DeepSleep PWM Waveform Generator¶
1 功能概述¶
本例程演示如何使 SoC 在 DeepSleep 状态下输出 PWM 波形,并使用 APB HW Timer0 定时唤醒并修改 PWM 波形周期和占空比。
2 环境准备¶
硬件设备与线材:
PAN107X EVB 核心板与底板各一块
JLink 仿真器(用于烧录例程程序)
逻辑分析仪(Logic Analyzer, LA,用于观察 PWM 波形信息)
电流计(本文使用电流可视化测量设备 PPK2 [Nordic Power Profiler Kit II] 进行演示)
USB-TypeC 线一条(用于底板供电和查看串口打印 Log)
杜邦线数根或跳线帽数个(用于连接各个硬件设备)
硬件接线:
将 EVB 核心板插到底板上
为确保能够准确地测量 SoC 本身的功耗,排除底板外围电路的影响,请确认 EVB 底板上的:
Voltage 排针组中的 VCC 和 VDD 均接至 3V3
POWER 开关从 LDO 档位拨至 BAT 档位(并确认底板背部的电池座内没有纽扣电池)
使用 USB-TypeC 线,将 PC USB 插口与 EVB 底板 USB->UART 插口相连
使用杜邦线将 EVB 底板上的 TX 引脚接至核心板 P16,RX 引脚接至核心板 P17
使用杜邦线将 JLink 仿真器的:
SWD_CLK 引脚与 EVB 底板的 P00 排针相连
SWD_DAT 引脚与 EVB 底板的 P01 排针相连
SWD_GND 引脚与 EVB 底板的 GND 排针相连
将逻辑分析仪硬件的:
USB 接口连接至 PC USB 接口
三个通道的信号线分别连接至 EVB 底板的 P03 / P04 / P15 排针
GND 连接至 EVB 底板的 GND 排针
将 PPK2 硬件的:
USB DATA/POWER 接口连接至 PC USB 接口
VOUT 连接至 EVB 底板的 VBAT 排针
GND 连接至 EVB 底板的 GND 排针
PC 软件:
串口调试助手(UartAssist)或终端工具(SecureCRT),波特率 921600(用于接收串口打印 Log)
Logic(用于配合逻辑分析仪抓取 IO 波形)
nRF Connect Desktop(用于配合 PPK2 测量 SoC 电流)
3 编译和烧录¶
例程位置:<PAN10XX-NDK>\01_SDK\nimble\samples\low_power\deepsleep_pwm_waveform_generator\keil_107x
双击 Keil Project 文件打开工程进行编译烧录,烧录成功后断开 JLink 连线。
4 例程演示说明¶
PC 上打开 PPK2 Power Profiler 软件,供电电压选择 3300 mV,然后打开供电开关
从串口工具中看到如下的打印信息:
Try to load HW calibration data.. DONE. - Chip Info : 0x1 - Chip CP Version : 255 - Chip FT Version : 6 - Chip MAC Address : E1100000101D - Chip UID : 0D0001465454455354 - Chip Flash UID : 4250315A3538380B004B554356034578 - Chip Flash Size : 512 KB APP version: 130.99.13608 Wait for Task Notifications.. [Uptime: 183 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 185 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 284 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 384 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 484 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 584 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 684 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 784 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 884 ms] Timer0 ISR in, pwm_period = 0, pwm_pulse = 0. [Uptime: 1083 ms] Timer0 ISR in, pwm_period = 172, pwm_pulse = 91. [Uptime: 1183 ms] Timer0 ISR in, pwm_period = 158, pwm_pulse = 30. [Uptime: 1283 ms] Timer0 ISR in, pwm_period = 43, pwm_pulse = 28. [Uptime: 1383 ms] Timer0 ISR in, pwm_period = 276, pwm_pulse = 84. [Uptime: 1483 ms] Timer0 ISR in, pwm_period = 14, pwm_pulse = 9. ...
观察逻辑分析仪波形,发现芯片 P03 引脚输出周期为 100ms,占空比为 50% 的波形;P04 引脚输出周期为0~10ms可变,占空比可变的波形; P15 引脚以 100ms 左右的间隔翻转:
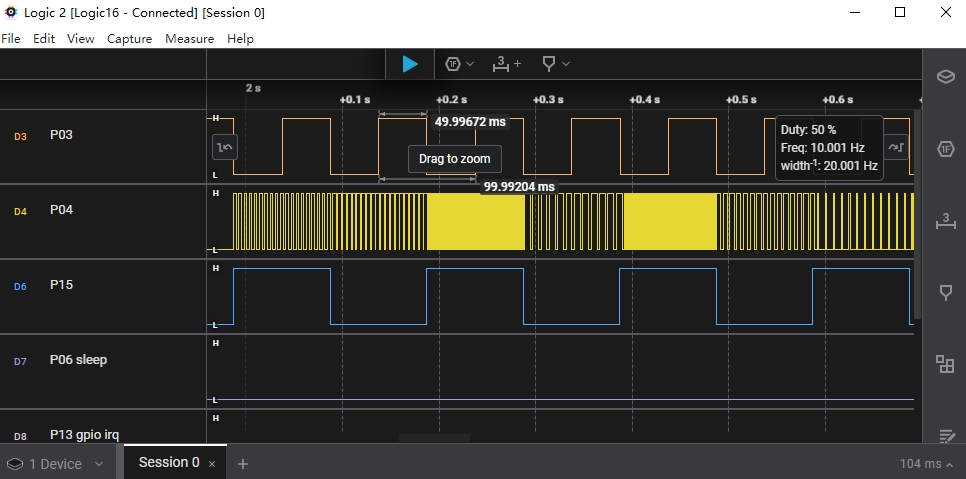
使用逻辑分析仪抓取 PWM 输出波形¶
可见 PWM 波形输出是连续不间断的,说明低功耗期间 PWM 仍可以正常工作,期间 P15 引脚翻转说明 Timer0 定时时间到了触发芯片唤醒,并改变 P04 引脚的 PWM 波形参数。
将逻辑分析仪从芯片上断开(避免影响电流观测),再观察芯片电流波形:
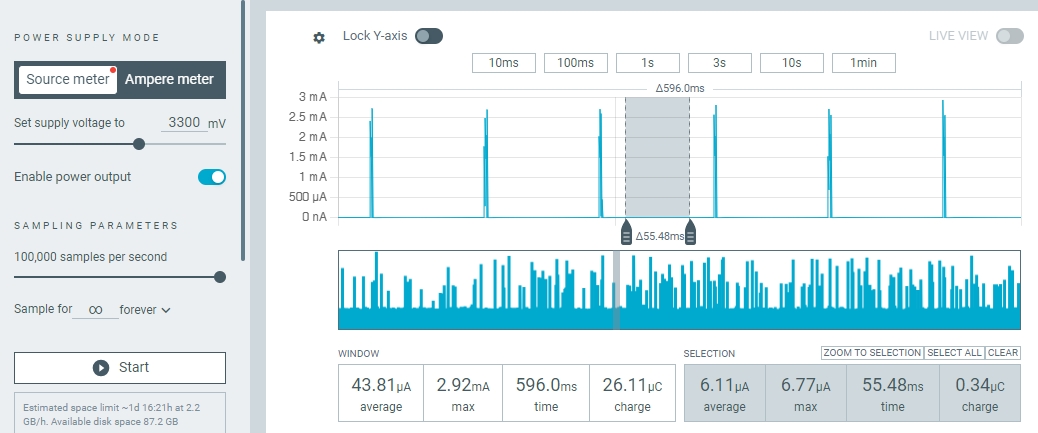
使用电流计抓取电流波形¶
可见芯片低功耗底电流为 6uA 左右(比 GPIO 唤醒等其他模式的 4uA 底电流稍大一些,这是因为当前 DeepSleep 状态下内部 PWM 模块仍在工作),并且每隔 100ms 左右芯片从 DeepSleep 状态下唤醒。
5 开发者说明¶
5.1 App Config 配置¶
本例程的 App Config(对应 app_config_spark.h 文件)配置如下:
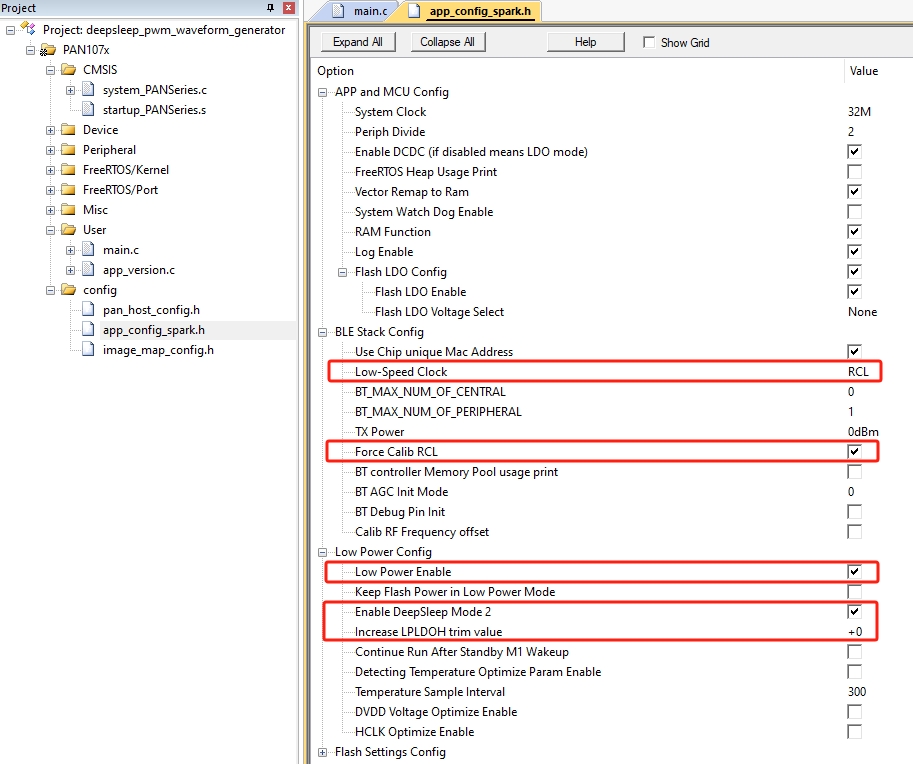
App Config File¶
其中,与本例程相关的配置有:
Low-Speed Clock (
CONFIG_LOW_SPEED_CLOCK_SRC = 0 (RCL)):系统低速时钟使用内部 32K 低速 RC 时钟(RCL)Force Calib RCL (
CONFIG_FORCE_CALIB_RCL_CLK = 1):在系统初始化阶段强制校准一次 RCL 时钟,此操作会增加 50ms 左右的启动时间Low Power Enable (
CONFIG_PM = 1):使能系统低功耗流程Enable DeepSleep Mode2 (
CONFIG_DEEPSLEEP_MODE_2 = 1):使能系统低功耗 DeepSleep 模式 2,此模式下使用电压较高的 LP-LDO-H(0.7v以上)给芯片所有外设模块供电,以确保低功耗下 PWM 输出 和 Timer 唤醒均正常Increase LPLDOH trim value (
CONFIG_SOC_INCREASE_LPLDOH_CALIB_CODE = 0):提高 LP-LDO-H 的电压,默认配置为 0,表示使用当前芯片默认的校准电压,但有时候此电压可能无法确保 PWM 输出和 Timer 唤醒正常,因此可以配置此选项以提高 LP-LDO-H 的电压值
5.2 程序代码¶
5.2.1 主程序¶
主程序 app_main() 函数内容如下:
void app_main(void)
{
BaseType_t r;
print_version_info();
/* Create an App Task */
r = xTaskCreate(app_task, // Task Function
"App Task", // Task Name
APP_TASK_STACK_SIZE, // Task Stack Size
NULL, // Task Parameter
APP_TASK_PRIORITY, // Task Priority
NULL // Task Handle
);
/* Check if task has been successfully created */
if (r != pdPASS) {
printf("Error, App Task created failed!\n");
while (1);
}
}
打印 App 版本信息
创建 App 主任务 “App Task”,对应任务函数
app_task确认线程创建成功,否则打印出错信息
5.2.2 App 主任务¶
App 主任务 app_task() 函数内容如下:
void app_task(void *arg)
{
uint32_t ulNotificationValue;
/* Store the handle of current task. */
xTaskToNotify = xTaskGetCurrentTaskHandle();
if(xTaskToNotify == NULL) {
printf("Error, get current task handle failed!\n");
while (1);
}
/* Initialize random seed for later pwm random duty use */
srand(2024);
/* Init GPIO P15 as indication IO */
GPIO_SetMode(P1, BIT5, GPIO_MODE_OUTPUT);
/* Init specific Timers for wake up use */
wakeup_timer_init();
/* Init specific PWM channels */
pwm_init();
while (1) {
printf("Wait for Task Notifications..\n");
/*
* Here we try to take the task notify to let OS fall into idle task and
* enter SoC DeepSleep mode. We'll never wakeup this task by giving notify.
*/
ulNotificationValue = ulTaskNotifyTake(pdTRUE, portMAX_DELAY);
printf("A notification received, value: %d.\n\n", ulNotificationValue);
}
}
获取当前任务的 Task Handle,用于后续中断中给次任务发送通知使用
初始化随机数种子,以供后续 Timer0 中断的修改 PWM 周期和占空比流程中使用
将 P15 初始化为推挽输出模式
在 wakeup_timer_init() 函数中初始化 HW APB Timer0
在 pwm_init() 函数中初始化 PWM Channel 2 和 Channel 3
在 while (1) 主循环中尝试获取任务通知(Task Task Notify),并打印相关的状态信息
5.2.3 Timer0 初始化程序¶
Timer0 初始化程序 wakeup_timer_init() 函数内容如下:
static void wakeup_timer_init(void)
{
/* Configure HW APB Timer0 with interrupt and wakeup enabled */
/*
* Configure timeout
* timeout = TIMER_CMP_VAL * (TIMER_PRESCALE + 1) / SYS_CLOCK_32K
* = 32000 / 10 * (0 + 1) / 32000 (s)
* = 0.1 s = 100 ms
*/
const uint32_t TIMER_PRESCALE = 0;
const uint32_t TIMER_CMP_VAL = soc_32k_clock_freq_get() / 10;
/* Enable HW Timer0 Module clock */
CLK_APB1PeriphClockCmd(CLK_APB1Periph_TMR0, ENABLE);
/* Select Timer counting clock source to low-speed 32K clock */
CLK_SetTmrClkSrc(TIMER0, CLK_APB1_TMR0SEL_RCL32K);
/* Set Timer to periodic mode */
TIMER_SetCountingMode(TIMER0, TIMER_PERIODIC_MODE);
/* Enable Timer interrupt */
TIMER_EnableInt(TIMER0);
/* Enable Timer wakeup */
TIMER_EnableWakeup(TIMER0);
/* Enable Timer0 interrupt flag0 and wakeup flag0 signal */
TIMER0->CTL |= BIT8 | BIT11;
/* Enable NVIC IRQ for Timer */
NVIC_EnableIRQ(TMR0_IRQn);
/* Set timeout value */
TIMER_SetPrescaleValue(TIMER0, TIMER_PRESCALE);
TIMER_SetCmpValue(TIMER0, TMR0_COMPARATOR_SEL_CMP, TIMER_CMP_VAL + TIMER0_CMPDAT_DEVIATION);
/* Start Timer */
TIMER_Start(TIMER0);
}
此函数目的是将 Timer0 模块配置为每隔 100ms 唤醒系统并产生中断
由公式
timeout = TIMER_CMP_VAL * (TIMER_PRESCALE + 1) / SYS_CLOCK_32K,可知一个比较简单的配置方法是将 TIMER_CMP_VAL 配置为 3200,TIMER_PRESCALE 配置为 1配置并使能 Timer0 的流程包括:
使能 APB1 上的 Timer0 时钟
配置 Timer 计数时钟为 32K Clock
将 Timer0 配置为周期模式
使能 Timer0 的中断功能
使能 Timer0 的唤醒功能
使能 Timer0 的计数器 0 的中断和唤醒控制位
使能 Timer0 的 NVIC IRQ
配置 Timer0 的 Prescaler 预分频
配置 Timer0 的 Compare Value
启动 Timer0 计数
5.2.4 Timer0 中断服务程序¶
Timer0 的中断服务程序如下:
CONFIG_RAM_CODE void TMR0_IRQHandler(void)
{
static uint32_t cnt;
uint32_t pwm_pulse = 0;
uint32_t pwm_period = 0;
/* Handle timer interrupt event */
if (TIMER_GetIntFlag(TIMER0)) {
/* Clear timer int flags */
TIMER_ClearTFFlag(TIMER0, TIMER_GetTFFlag(TIMER0));
TIMER_ClearIntFlag(TIMER0);
/* Randomize PWM CH3 duty cycle after 10 times this handler execute */
if (++cnt > 9) {
pwm_period = rand() % 319 + 1;
pwm_pulse = rand() % pwm_period;
/*
* PWM Channel 3:
* - Period = (<0~319> + 1) cycles = <1~320> * 1 / 32000 s = (0~10) ms
* - Pulse = (<0~319> + 1) cycles = (0~10) ms
*/
PWM_SetPeriodAndDuty(PWM, PWM_CH3, pwm_period, pwm_pulse);
}
/* Toggle GPIO to indicate timer is timeout */
GPIO_Toggle(P1, BIT5);
/* Print system uptime to UART */
printf("[Uptime: %d ms] Timer0 ISR in, pwm_period = %d, pwm_pulse = %d.\n",
soc_lptmr_uptime_get_ms(), pwm_period, pwm_pulse);
}
/* Clear wakeup flag if there is. */
TIMER_ClearWakeupFlag(TIMER0, TIMER_GetWakeupFlag(TIMER0));
}
在函数名称前面加上
CONFIG_RAM_CODE以将此函数编译成 RAM Code(需确保 app_config_spark.h 中的CONFIG_RAM_FUNCTION为使能状态)使用 TIMER_GetIntFlag() 接口检查 Timer0 中断 Flag 是否置位,若是则:
清除 Timeout Flag
清除 中断 Flag
满足一定条件后重新随机配置 PWM Channel 3 波形的周期和占空比
翻转 GPIO P15,并向串口打印当前时间戳和 PWM 参数信息
使用 TIMER_ClearWakeupFlag() 接口清除 Timer0 唤醒 Flag
5.2.5 PWM 初始化程序¶
PWM 初始化程序 pwm_init() 函数内容如下:
static void pwm_init(void)
{
/* Configure HW PWM module which can output waveform even in SoC DeepSleep mode */
/*
* Configure PWM waveform period and duty:
* PWM CH2 (PWM clock source is divided by PWM CLKDIV and CLKPSC):
* - pwm_cnt_freq = PAN_RCC_CLOCK_FREQUENCY_SLOW / (PWM_CH23_CLKPSC + 1) / PWM_CH2_CLKDIV
* = 32000 / (3 + 1) / 2 (Hz)
* = 4000 Hz
* - period = 1 / pwm_cnt_freq * (PWM_CH2_PERIOD_CNT + 1)
* = 1 / 4000 * (399 + 1) (s)
* = 100 ms
* - pulse = 1 / pwm_cnt_freq * (PWM_CH2_PULSE_CNT + 1)
* = 1 / 4000 * (199 + 1) (s)
* = 50 ms
* PWM CH3 (PWM clock source is configured as directly from 32K Clock):
* - pwm_cnt_freq = PAN_RCC_CLOCK_FREQUENCY_SLOW
* = 32000 Hz
* - period = 1 / pwm_cnt_freq * (PWM_CH3_PERIOD_CNT + 1)
* = 1 / 32000 * (15999 + 1) (s)
* = 500 ms
* - pulse = 1 / pwm_cnt_freq * (PWM_CH3_PULSE_CNT + 1)
* = 1 / 32000 * (3199 + 1) (s)
* = 100 ms
*/
const uint32_t PWM_CH23_CLKPSC = 3;
const PWM_ClkDivDef PWM_CH2_CLKDIV = PWM_CLK_DIV_2;
const uint32_t PWM_CH2_PERIOD_CNT = 399;
const uint32_t PWM_CH2_PULSE_CNT = 199;
const PWM_ClkDivDef PWM_CH3_CLKDIV = PWM_CLK_DIRECT;
const uint32_t PWM_CH3_PERIOD_CNT = 15999;
const uint32_t PWM_CH3_PULSE_CNT = 3199;
/* Set PWM channel 2/3 counting clock source to 32K clock */
CLK_SetPwmClkSrc(PWM_CH2, CLK_APB1_PWM_CH23_SEL_CLK32K);
/* Enable clock of PWM and related channel */
CLK_APB1PeriphClockCmd(CLK_APB1Periph_PWM0_EN | CLK_APB1Periph_PWM0_CH23, ENABLE);
/* Enable Pinmux of target PWM channel */
SYS_SET_MFP(P0, 3, PWM_CH2);
SYS_SET_MFP(P0, 4, PWM_CH3);
/*
* Set clock prescaler (clk_psc) of PWM Channel 2/3.
* NOTE that the channel 2 and 3 share the same prescaler.
*/
PWM_SetPrescaler(PWM, PWM_CH2, PWM_CH23_CLKPSC);
/* Set clock divider (clk_div) of PWM channel 2/3 */
PWM_SetDivider(PWM, PWM_CH2, PWM_CH2_CLKDIV);
PWM_SetDivider(PWM, PWM_CH3, PWM_CH3_CLKDIV);
/* Init PWM channel 2/3 with different period and pulse cycles */
PWM_SetPeriodAndDuty(PWM, PWM_CH2, PWM_CH2_PERIOD_CNT, PWM_CH2_PULSE_CNT);
PWM_SetPeriodAndDuty(PWM, PWM_CH3, PWM_CH3_PERIOD_CNT, PWM_CH3_PULSE_CNT);
/* Invert output level of PWM channel 3 */
PWM_EnableOutputInverter(PWM, BIT(PWM_CH3));
/* Enable Output of PWM channel 2/3 */
PWM_EnableOutput(PWM, BIT(PWM_CH2));
PWM_EnableOutput(PWM, BIT(PWM_CH3));
/* Start PWM internal counter */
PWM_StartChannel(PWM, PWM_CH2);
PWM_StartChannel(PWM, PWM_CH3);
}
此函数功能是:
将 PWM Channel 2 输出周期 100ms,占空比 50% 的波形
将 PWM Channel 3 初始输出周期 500ms,占空比 20% 的波形(后续会在 Timer0 中断中修改)
PWM 配置也有 Prescaler 和 Clock Divisor 的概念,它们共同决定了 1 个 PWM Count 的时间,具体公式计算请参考代码注释
配置并使能 PWM 的流程包括:
配置 PWM 计数时钟为 32K Clock
使能 APB1 上的 PWM 时钟 和 PWM Channel 2 / Channel 3 时钟
配置 Pinmux 引脚,将 P03 配置为 PWM Channel 2 功能,P04 配置为 PWM Channel 3 功能
配置 PWM Channel 2 和 Channel 3 的 Prescaler 预分频参数(两个通道共用一个参数)
配置 PWM Channel 2 和 Channel 3 的 Clock Dividor 分频系数(各个通道可单独配置)
配置 PWM Channel 2 和 Channel 3 的周期和占空比
反相 PWM Channel 3 输出波形
使能 PWM Channel 2 和 Channel 3 的输出功能
启动 PWM Channel 2 和 Channel 3
5.2.6 与低功耗相关的 Hook 函数¶
本例程还用到了 2 个与低功耗密切相关的 Hook 函数:
CONFIG_RAM_CODE void vSocDeepSleepEnterHook(void)
{
#if CONFIG_LOG_ENABLE
reset_uart_io();
#endif
}
CONFIG_RAM_CODE void vSocDeepSleepExitHook(void)
{
#if CONFIG_LOG_ENABLE
set_uart_io();
#endif
}
上述两个 Hook 函数用于在进入 DeepSleep 前和从 DeepSleep 唤醒后做一些额外操作,如关闭和重新配置 IO 为串口功能,以防止 DeepSleep 状态下 IO 漏电
详细解释请参考 DeepSleep GPIO Key Wakeup 例程中的相关介绍