DeepSleep GPIO PWM Wakeup¶
1 功能概述¶
本例程演示如何使 SoC 进入 DeepSleep 状态,然后使用外部 PWM 波形通过 GPIO 将其唤醒。
2 环境准备¶
硬件设备与线材:
PAN107X EVB 核心板与底板各两块
JLink 仿真器(用于烧录例程程序)
逻辑分析仪(Logic Analyzer, LA,用于观察 PWM 波形信息和 GPIO 中断信息)
电流计(本文使用电流可视化测量设备 PPK2 [Nordic Power Profiler Kit II] 进行演示)
USB-TypeC 线一条(用于底板供电和查看串口打印 Log)
杜邦线数根或跳线帽数个(用于连接各个硬件设备)
硬件接线(本例程):
将其中一块 EVB 核心板插到其中一块底板上
为确保能够准确地测量 SoC 本身的功耗,排除底板外围电路的影响,请确认 EVB 底板上的:
Voltage 排针组中的 VCC 和 VDD 均接至 3V3
POWER 开关从 LDO 档位拨至 BAT 档位(并确认底板背部的电池座内没有纽扣电池)
使用 USB-TypeC 线,将 PC USB 插口与 EVB 底板 USB->UART 插口相连
使用杜邦线将 EVB 底板上的 TX 引脚接至核心板 P16,RX 引脚接至核心板 P17
使用杜邦线将 JLink 仿真器的:
SWD_CLK 引脚与 EVB 底板的 P00 排针相连
SWD_DAT 引脚与 EVB 底板的 P01 排针相连
SWD_GND 引脚与 EVB 底板的 GND 排针相连
将逻辑分析仪硬件的:
USB 接口连接至 PC USB 接口
三个通道的信号线分别连接至 EVB 底板的 P13 / P14 / P15 排针
GND 连接至 EVB 底板的 GND 排针
将 PPK2 硬件的:
USB DATA/POWER 接口连接至 PC USB 接口
VOUT 连接至 EVB 底板的 VBAT 排针
GND 连接至 EVB 底板的 GND 排针
硬件接线(PWM Waveform Generator 例程):
参考 DeepSleep PWM Waveform Generator 例程中的介绍搭建 PWM 波形输出环境
将 PWM 波形输出例程的 P03 引脚与 GPIO 唤醒例程的 P13 引脚相连
将 PWM 波形输出例程的 P04 引脚与 GPIO 唤醒例程的 P14 引脚相连
PC 软件:
串口调试助手(UartAssist)或终端工具(SecureCRT),波特率 921600(用于接收串口打印 Log)
Logic(用于配合逻辑分析仪抓取 IO 波形)
nRF Connect Desktop(用于配合 PPK2 测量 SoC 电流)
3 编译和烧录¶
例程位置:<PAN10XX-NDK>\01_SDK\nimble\samples\low_power\deepsleep_gpio_pwm_wakeup\keil_107x
双击 Keil Project 文件打开工程进行编译烧录,烧录成功后断开 JLink 连线以避免漏电。
4 例程演示说明¶
PC 上打开 PPK2 Power Profiler 软件,供电电压选择 3300 mV,然后打开供电开关
从串口工具中看到如下的打印信息:
Try to load HW calibration data.. DONE. - Chip Info : 0x1 - Chip CP Version : 255 - Chip FT Version : 6 - Chip MAC Address : E11000000FF8 - Chip UID : 6D0001465454455354 - Chip Flash UID : 4250315A3538380B005B7B4356037D78 - Chip Flash Size : 512 KB APP version: 255.255.65535 Wait for Task Notifications..
将 PWM 波形输出板卡上电,使能 PWM 输出,此时观察 GPIO 唤醒例程的 Log,可以看到触发了多次的唤醒过程:
[Uptime: 90 ms] GPIO IRQ triggered: P14. A notification received, value: 1. Wait for Task Notifications.. [Uptime: 100 ms] GPIO IRQ triggered: P14. A notification received, value: 1. Wait for Task Notifications.. [Uptime: 109 ms] GPIO IRQ triggered: P14. A notification received, value: 1. Wait for Task Notifications.. [Uptime: 116 ms] GPIO IRQ triggered: P13. A notification received, value: 1. Wait for Task Notifications.. [Uptime: 118 ms] GPIO IRQ triggered: P14. A notification received, value: 1. ...
此时观察芯片电流波形,可以更清晰地看出芯片多次睡眠唤醒的切换过程:
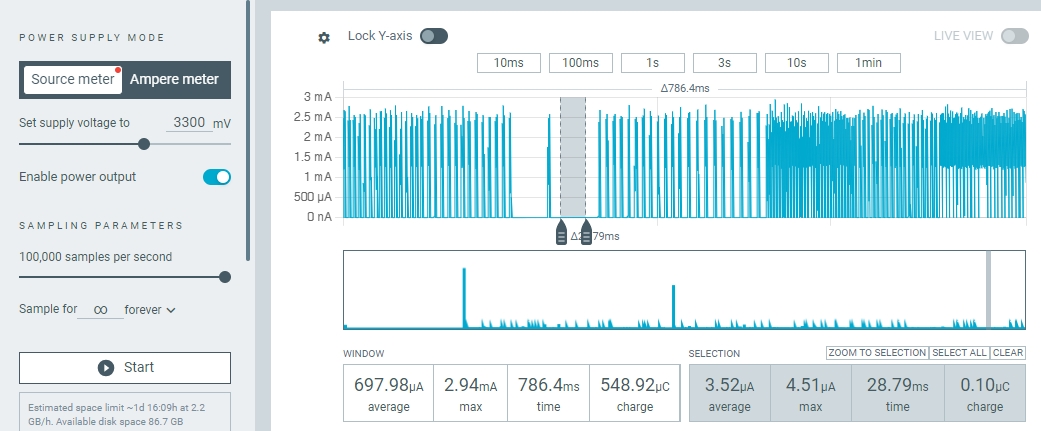
系统被外部 PWM 波唤醒电流波形¶
再观察逻辑分析仪波形,可以看出 GPIO P13/P14 分别被各自输入的 PWM 波形的上升沿唤醒并触发中断:
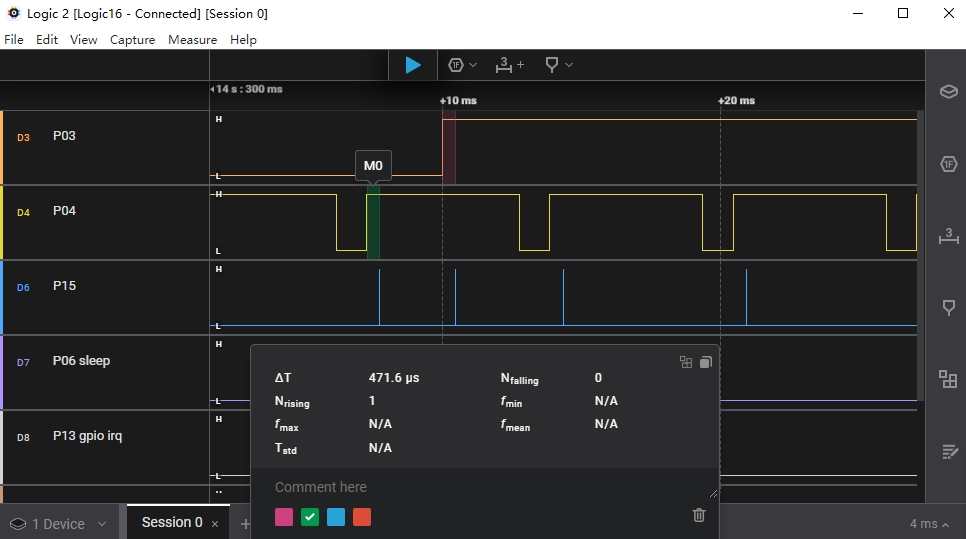
系统被外部 PWM 波唤醒LA波形¶
程序中的两个 GPIO 均被配置为上升沿唤醒,从 LA 波形中可以看出,两个 IO 中的任意一个检测到 GPIO 上升沿,均在经过 470us 左右的时间后触发芯片唤醒并执行 GPIO 中断(由 P15 引脚指示)
5 开发者说明¶
5.1 App Config 配置¶
本例程的 App Config(对应 app_config_spark.h 文件)配置与 DeepSleep GPIO Key Wakeup 例程完全相同:
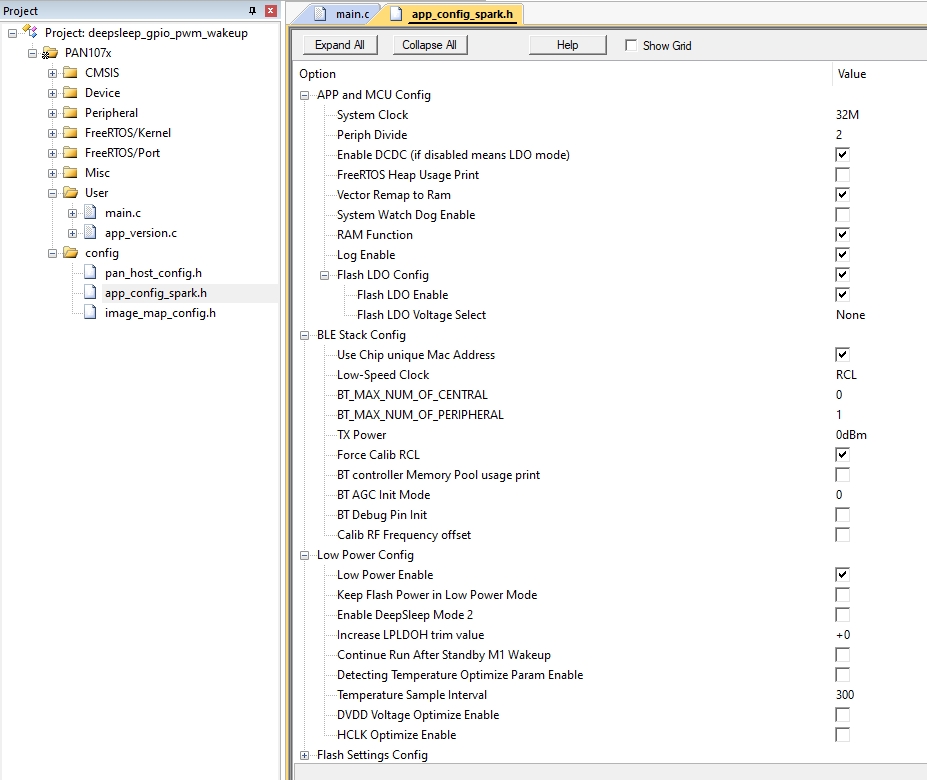
App Config File¶
5.2 程序代码¶
5.2.1 主程序¶
主程序 app_main() 函数内容如下:
void app_main(void)
{
BaseType_t r;
print_version_info();
/* Create an App Task */
r = xTaskCreate(app_task, // Task Function
"App Task", // Task Name
APP_TASK_STACK_SIZE, // Task Stack Size
NULL, // Task Parameter
APP_TASK_PRIORITY, // Task Priority
NULL // Task Handle
);
/* Check if task has been successfully created */
if (r != pdPASS) {
printf("Error, App Task created failed!\n");
while (1);
}
}
打印 App 版本信息
创建 App 主任务 “App Task”,对应任务函数
app_task确认线程创建成功,否则打印出错信息
5.2.2 App 主任务¶
App 主任务 app_task() 函数内容如下:
void app_task(void *arg)
{
uint32_t ulNotificationValue;
/* Store the handle of current task. */
xTaskToNotify = xTaskGetCurrentTaskHandle();
if(xTaskToNotify == NULL) {
printf("Error, get current task handle failed!\n");
while (1);
}
/*
* Init specific GPIOs:
* - to input mode for wake up use
* - to output mode for ISR indication use
*/
gpio_init();
while (1) {
printf("Wait for Task Notifications..\n");
/*
* Wait to be notified that gpio gpio irq occured. Note the first parameter is pdTRUE,
* which has the effect of clearing the task's notification value back to 0, making
* the notification value act like a binary (rather than a counting) semaphore.
*/
ulNotificationValue = ulTaskNotifyTake(pdTRUE, portMAX_DELAY);
printf("A notification received, value: %d.\n\n", ulNotificationValue);
}
}
获取当前任务的 Task Handle,用于后续中断中给次任务发送通知使用
在 gpio_init() 函数中初始化 GPIO 配置
在 while (1) 主循环中尝试获取任务通知(Task Task Notify),并打印相关的状态信息
5.2.3 GPIO 初始化程序¶
GPIO 初始化程序 gpio_init() 函数内容如下:
static void gpio_init(void)
{
/* Configure GPIO P13/P14 as Rising Edge Interrupt/Wakeup */
/* Set pinmux func as GPIO */
SYS_SET_MFP(P1, 3, GPIO);
SYS_SET_MFP(P1, 4, GPIO);
/* Set GPIOs to input mode */
GPIO_SetMode(P1, BIT3 | BIT4, GPIO_MODE_INPUT);
/* Enable GPIO interrupts and set trigger type to Falling Edge */
GPIO_EnableInt(P1, 3, GPIO_INT_RISING);
GPIO_EnableInt(P1, 4, GPIO_INT_RISING);
/* Configure debounce clock to 32K clock so that GPIO edge could wake up SoC */
GPIO_SetDebounceTime(GPIO_DBCTL_DBCLKSRC_RCL, GPIO_DBCTL_DBCLKSEL_4);
/* Enable GPIO IRQs in NVIC */
NVIC_EnableIRQ(GPIO1_IRQn);
/* Configure GPIO P15 to push-pull output mode (with init low level) */
P15 = 0;
GPIO_SetMode(P1, BIT5, GPIO_MODE_OUTPUT);
}
此函数使用 Panchip Low-Level GPIO Driver 对 GPIO 进行配置
实际上也可使用更上层的 Panchip HAL GPIO Driver 进行配置,具体可参考GPIO Digital Input Interrupt例程中的相关介绍
配置流程如下:
配置 P13 和 P14 引脚 Pinmux 至 GPIO 功能(此步骤可省略,原因是这两个引脚默认就是 GPIO 功能)
使能 P13 和 P14 的数字输入模式
使能 P13 和 P14 的中断,将其配置为上升沿触发中断(即上升沿唤醒)
配置 GPIO 去抖时钟为 32K Clock,以支持边沿唤醒(注意此处并不使能各个 IO 的去抖功能)
使能 GPIO1 NVIC IRQ
将 P15 配置为推挽输出功能
5.2.4 GPIO 中断服务程序¶
GPIO P1 的中断服务程序如下:
void GPIO1_IRQHandler(void)
{
BaseType_t xHigherPriorityTaskWoken = pdTRUE;
for (size_t i = 0; i < 8; i++) {
if (GPIO_GetIntFlag(P1, BIT(i))) {
GPIO_ClrIntFlag(P1, BIT(i));
P15 = 1;
P15 = 0;
printf("[Uptime: %d ms] GPIO IRQ triggered: P1%d.\n", soc_lptmr_uptime_get_ms(), i);
}
}
/* Notify the task that gpio IRQ occured. */
vTaskNotifyGiveFromISR(xTaskToNotify, &xHigherPriorityTaskWoken);
}
GPIO 中断服务函数内部可通过
GPIO_GetIntFlag()接口判断触发中断的是哪根引脚在中断服务函数中需注意调用
GPIO_ClrIntFlag()接口清除中断标志位使用
soc_lptmr_uptime_get_ms()接口获取系统的上电时间戳并打印到串口使用 FreeRTOS
vTaskNotifyGiveFromISR()接口向 App Task 发送通知,表示有 GPIO 中断产生(对应按键按下),此接口中xHigherPriorityTaskWoken变量被配置为pdTRUE,表示当中断返回后将会触发线程调度,而对于此例程来说则是重新调度至 App Task 中的ulTaskNotifyTake()处继续执行
5.2.5 与低功耗相关的 Hook 函数¶
本例程还用到了 2 个与低功耗密切相关的 Hook 函数:
CONFIG_RAM_CODE void vSocDeepSleepEnterHook(void)
{
#if CONFIG_LOG_ENABLE
reset_uart_io();
#endif
}
CONFIG_RAM_CODE void vSocDeepSleepExitHook(void)
{
#if CONFIG_LOG_ENABLE
set_uart_io();
#endif
}
上述两个 Hook 函数用于在进入 DeepSleep 前和从 DeepSleep 唤醒后做一些额外操作,如关闭和重新配置 IO 为串口功能,以防止 DeepSleep 状态下 IO 漏电
详细解释请参考 DeepSleep GPIO Key Wakeup 例程中的相关介绍