SoC App 开发指南¶
本文介绍 PAN1080 SDK APP 开发的基础知识,如何新建一个简单的 App 工程,并举例说明如何在 App 工程中操作 PAN1080 EVB 开发板的外设模块。
1 概述¶
PAN1080 SDK 基于 Zephyr OS 开发,其构建系统(Build System)使用 CMake。
01_SDK/zephyr目录下存放有 Zephyr OS 的核心代码、内核配置信息、SoC 定义、开发板定义以及 Panchip 提供的例程等。
Zephyr 目录结构如下所示:
Zephyr 的核心代码位于
01_SDK/zephyr目录下,其中包含一些重要的文件:CMakeLists.txt:CMake 构建系统的顶层文件,包含构建 Zephyr 核心代码所需的 CMake 信息。Kconfig:Kconfig 顶层文件,其直接引用另一个顶层文件Kconfig.zephyr。west.yml:west manifest 文件,其中列出了 west 工具能够识别和管理的外部模块目录。
Zephyr 的核心代码还包括如下这些顶层目录(每个顶层目录下还包括一个或多个子目录):
arch:存放芯片 CPU 架构级信息,由于 PAN1080 是 ARM 架构,因此其中只保留了 ARM 架构信息。soc:存放芯片 SoC 级信息及一些默认配置。boards:存放板级信息,比如 PAN1080 各种 EVB 开发板。doc:Zephyr 官方文档,其内容与 Zephyr文档官网一致。drivers:存放设备驱动代码。dts:存放 DeviceTree(芯片硬件初始化配置) 信息。include:存放 Zephyr 公开的 API 头文件。kernel:存放 Zephyr OS 内核代码。lib:存放库文件,包含一个简单的标准C语言库等。misc:其他一些不便分类的文件。samples_panchip:存放 Panchip 提供的 PAN1080 官方例程。scripts:存放编译测试相关的脚本文件。cmake:存放 CMake 构建 Zephyr App 所需的相关配置和脚本文件。subsys:Zephyr 子系统,包括:USB Device Stack(USB 设备栈)、File System(文件系统)、Bluetooth Host and Controller(低功耗蓝牙Host端与Controller端)等实现代码。share:存放一些额外的架构无关的数据,目前包含 Zephyr CMake Package。
一个最简单的 APP 工程文件结构如下所示:
<work_dir>/my_app
├── CMakeLists.txt
├── prj.conf
└── src
└── main.c
其中:
CMakeLists.txt: 构建系统从此文件中查找待编译 APP 源码,并将 APP 目录与 Zephyr 链接起来,使得 APP 可以编译、配置、使用 Zephyr 提供的各种功能。
配置文件: APP 需要提供一个 Kconfig 配置文件(通常称为
prj.conf),其中包含一个或多个 Zephyr 内核配置信息,这些配置与特定的芯片(SoC)配置、特定的开发板(Board)配置等配置信息合并,生成最终的配置文件(.config文件与autoconf.h文件)。APP 源码文件: APP 需要包含一个或多个C语言或汇编源码文件,这些文件通常位于名为
src的目录下。<work_dir>:App 工程所在的目录,一般放在
samples_panchip目录内。注:从文件结构上来说,构建系统允许我们将自己的 APP 工程创建在任意目录下;只要配置正确,命令行方式的构建系统可以在编译 APP 工程的时候,自动识别到 SDK 中 Zephyr 的路径;但目前 ZAL 工具只支持从
samples_panchip和tests_panchip两个目录中搜索 App 工程。
APP 工程创建后,我们即可以使用 ZAL 工具(或直接使用west build CLI 命令)触发编译操作(其内部是调用 CMake),编译过程中会自动生成单独的 Build(构建)目录,其中存放编译输出的所有文件。
下面介绍如何创建、构建和运行一个自定义的 APP。
3 参考相关例程¶
SDK 中提供了一些例程(位于01_SDK/zephyr/samples_panchip目录),可以直接编译下载到 EVB 开发板上执行,包括多线程打印消息、LED 闪灯、以及蓝牙相关例程等等。
在进行开发之前,建议先看一下相关的例程和文档,熟悉 Zephyr OS 的基本框架;然后实际将这些例程编译烧录至 EVB 开发板中查看运行效果,同时进一步熟悉开发环境的使用。

SDK 例程目录¶
另外,SDK 中也提供了一些 Zephyr 的测试用例(位于01_SDK/zephyr/tests_panchip目录),用于测试外设 Driver、OS Kernel 等功能是否正常。阅读这些测试用例代码,也有助于熟悉 Zephyr OS 提供的各种 API 的使用方法。
SDK 测试用例目录¶
4 新建一个 App 工程¶
创建一个 APP 最简单的方式,是从 01_SDK/zephyr/samples_panchip 目录下,Copy 一个例程,并将其中的非必要文件(如README.rst和sample.yaml)删除即可。
假设我们希望创建一个名为my_led_blink的 App 工程,使用 PWM 的方式将 EVB 开发板上的 LED 灯点亮并令其闪烁,要求:
首先,LED 灯在每 100ms 的时间内,亮 20ms、灭 80ms,持续 3s
然后,LED 灯在每 100ms 的时间内,亮 80ms、灭 20ms,持续 3s
重复上述闪烁规则
每次闪烁频率切换的时候,均向 UART 串口打印闪烁频率信息
下面我们详细讲解如何新建一个工程来实现上述需求。
4.1 从例程中拷贝一份相似的工程¶
例程blinky(位置:01_SDK/zephyr/samples_panchip/basic/blinky目录)演示了如何使用 GPIO 的方式点亮 LED 并令其每隔 1s 闪烁一次。
我们以此例程为基础进行修改:
拷贝一份
blinky并将其重命名为my_led_blink:
拷贝一个现有的例程¶
打开
CMakeList.txt,将第 5 行project参数修改为新的项目名称my_led_blink:# SPDX-License-Identifier: Apache-2.0 cmake_minimum_required(VERSION 3.20.0) find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE}) project(my_led_blink) target_sources(app PRIVATE src/main.c)
注:本 App 工程目录中,必要的文件为:
src\main.c: 主程序代码CMakeList.txt: cmake 文件prj.conf: 项目配置文件
其它两个文件不是必须的(在本示例中我们可以直接将其删除):
README.rst: 例程说明文件sample.yaml: 用于 Zephyr 单元测试的信息描述文件
确认 EVB 硬件接线:
使用 USB 线,将 PC USB 与 EVB Type-C USB(USB->UART)相连,用于供电及串口 Log 打印
将 JLink SWD 正确连接至 EVB 板(
P46:ICEK,P47:ICED)使用跳线帽将 P16 引脚与 RGB 灯的蓝色通道(RGB-B)引脚相连
打开 ZAL 工具,在 Project List 中找到新建的工程:
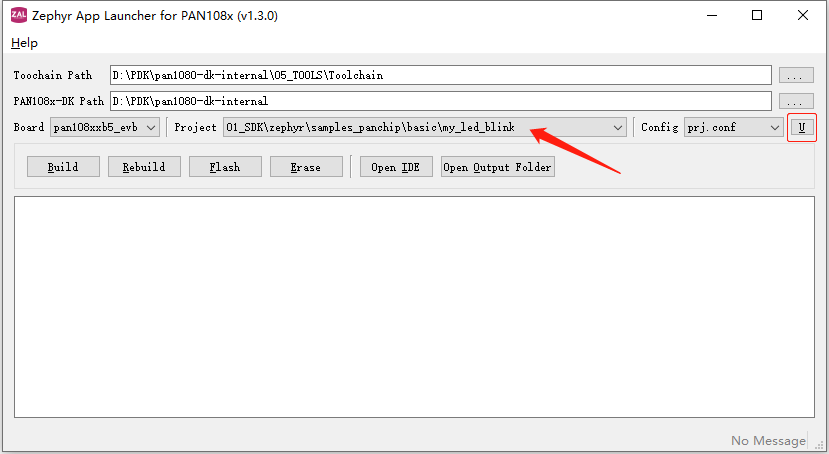
ZAL 选择新建的工程配置¶
如果在新增 App 工程目录之前,已经打开了 ZAL 工具,则在选择新的 App 工程之前,应先点击一下 ZAL 工具 Config 列表右面的
U按钮,更新 Project 列表。点击
build按钮,编译成功后会显示生成名为zephyr.elf的输出文件,同时显示当前工程的 FLASH 和 SRAM 占用信息: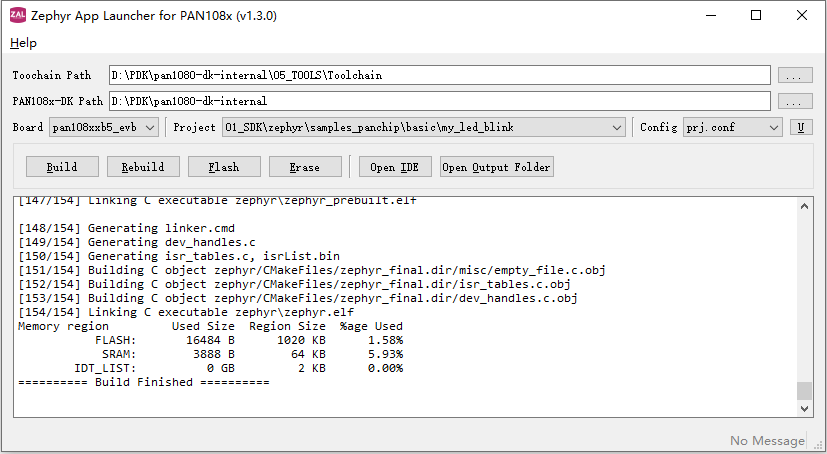
ZAL Build 新建的工程¶
点击
Flash按钮,将程序烧录至芯片Flash中: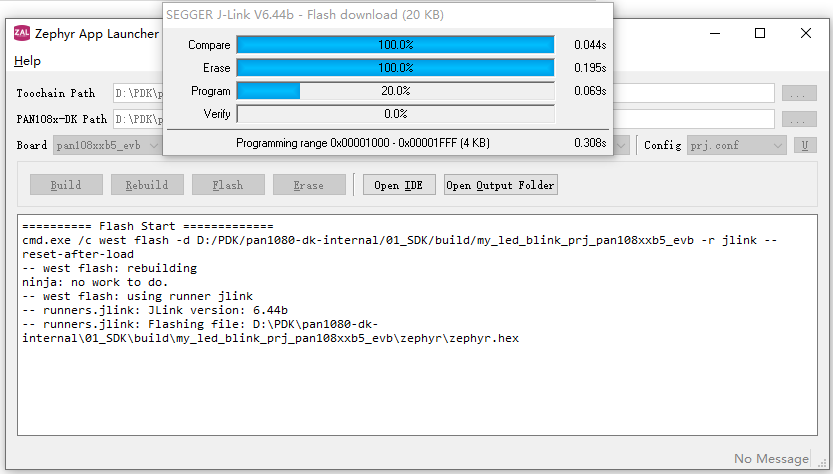
ZAL 烧录 新建的工程¶
烧录成功后,即可观察到 EVB 板上的蓝色 LED 灯以 1Hz 的频率不断闪烁:
最后,点击
Open IDE按钮,启动VS Code,后续代码修改与编译烧录调试均可在 VS Code 环境下进行: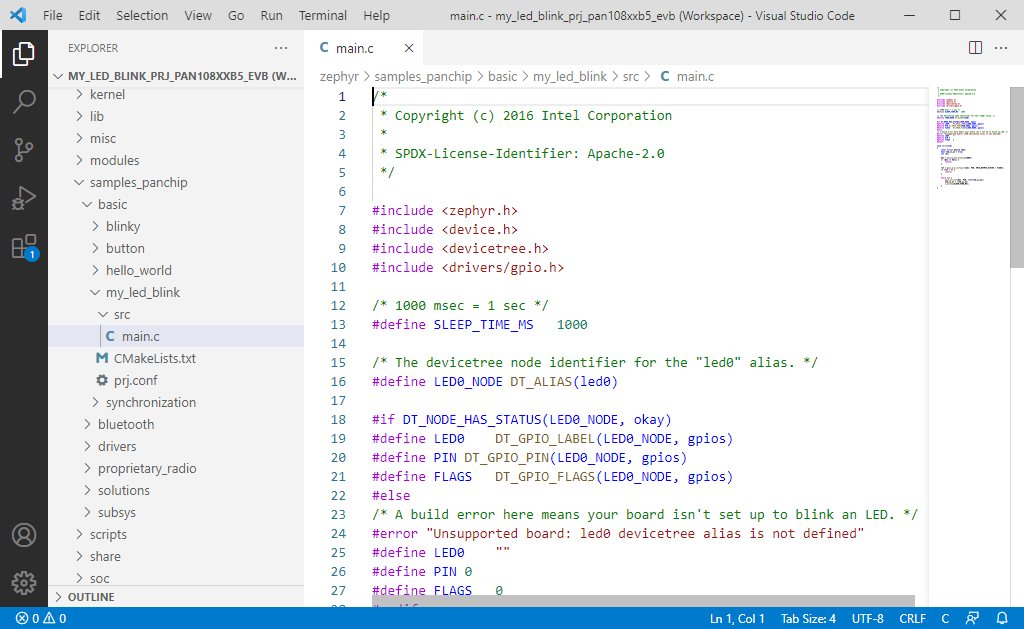
启动 VS Code¶
4.2 硬件资源规划¶
4.2.1 时钟与电源配置¶
在实际项目中我们需要确定 SoC 时钟源、内部各模块的时钟配置、电源选择等事项。但这里我们直接使用 EVB 板开发,因此暂不关注这些内容,使用默认配置参数即可。
EVB 板的电源选择相关,请参考 PAN108x EVB 硬件资源介绍 文档。
低功耗的时钟选择(RCL32K,XTL32768,ACT32K),请参考 低功耗蓝牙 Peripheral HR 例程 文档。
4.2.2 PWM 模块配置¶
我们使用 PAN1080 SoC 的 PWM 模块控制 EVB 板上的 LED 灯,为此我们需要规划:
使用哪个 PWM 模块的哪个输出通道(PAN1080 SoC 中内置了 3 个硬件 PWM 模块,分别为
PWM0、PWM1、PWM2,每个模块均有 8 个通道)将 PWM 波形输出到 SoC 的哪个引脚
需要注意的是,由于 PAN1080 SoC 的每个引脚最多只能配置成预设的 8 个功能之一,因此我们在规划引脚资源的时候,要查阅各个引脚的 PINMUX 定义,从中找到合适的引脚使用。
我们可以从 PAN1080 Development Kit 中的如下几个文件的任意一个中找到 PAN1080 SoC 的 PINMUX 引脚定义:
01_SDK/zephyr/dts/arm/panchip/pan1080/pan1080xx1_pinctrl.dtsi(32-Pin 封装引脚定义)01_SDK/zephyr/dts/arm/panchip/pan1080/pan1080xx5_pinctrl.dtsi(64-Pin 封装引脚定义)01_SDK/zephyr/include/drivers/pinmux/pinmux_pan1080.h04_DOC/07_others/PAN108x-Datasheet.pdf或04_DOC/07_others/PAN1080x-产品说明书.pdf
这里,我们直接从 VS Code 中打开
pan1080xx5_pinctrl.dtsi文件(按快捷键Ctrl+P,输入文件名即可)由于 EVB 板上的蓝色 LED 灯已经与
P16引脚相连,我们先查找P16引脚的 PINMUX 定义,看是否有 PWM 功能;查阅后发现其正好有一个pwm0_ch6 (PWM0 Channel 6)的定义,可以供我们使用: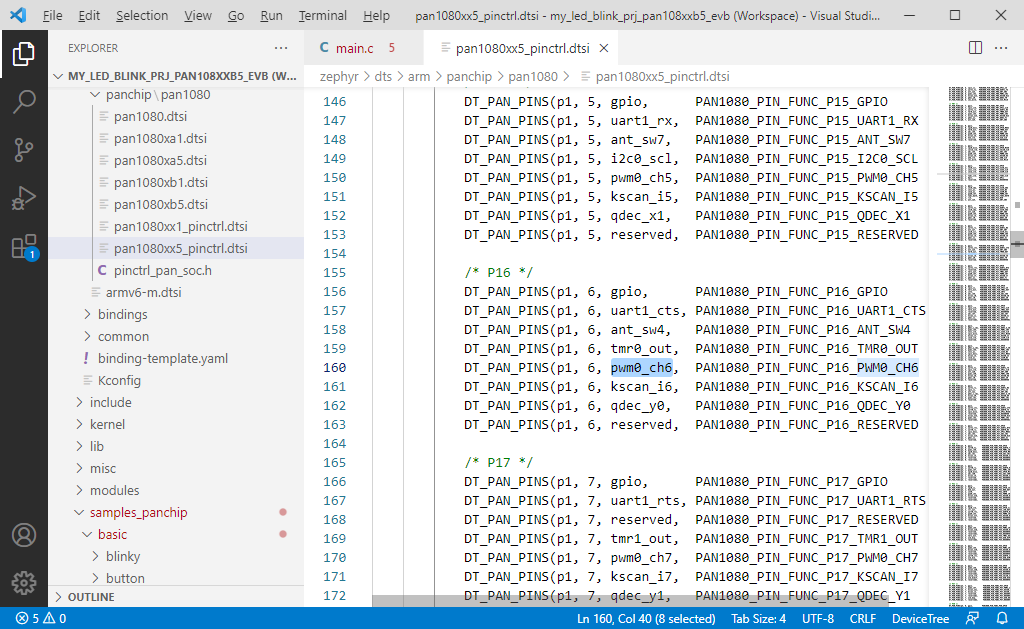
打开 pan1080xx5_pinctrl.dtsi 文件¶
为使规划的硬件资源生效,我们需要修改 SDK 中的板级 DeviceTree 文件。
从 VS Code 中打开名为
pan108xxb5_evb.dts的文件(按快捷键Ctrl+P,输入文件名即可):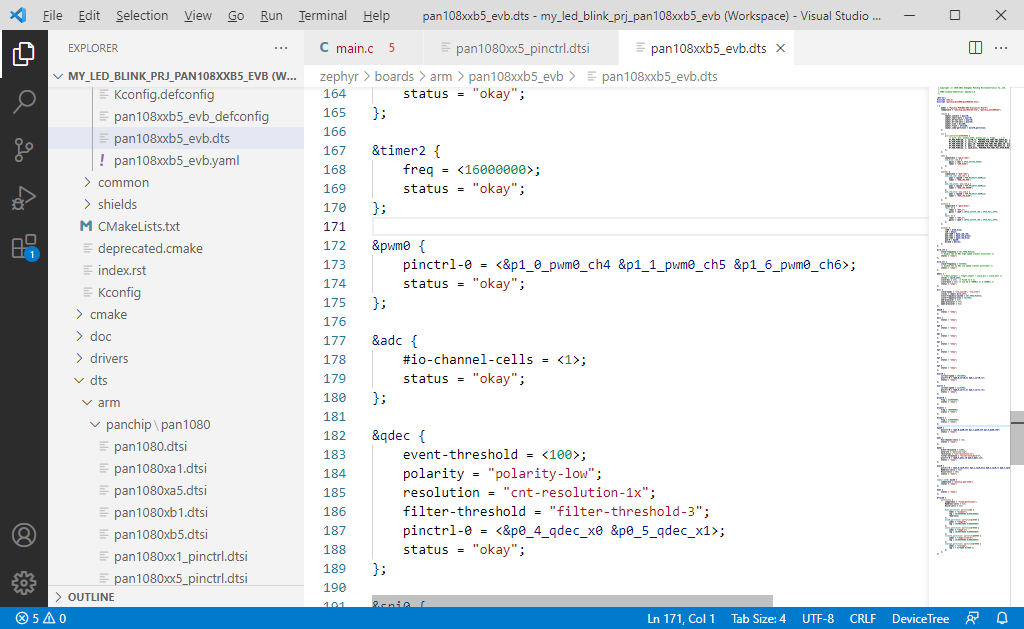
打开 pan108xxb5_evb.dts 文件¶
此文件中描述了关于 PAN108X-XB5 EVB 的所有板级硬件配置信息,这些配置保证了我们可以使用 EVB 开发板成功运行 SDK 中的所有例程(
samples_panchip)和测试用例(tests_panchip)。关于Zephyr DeviceTree(
.dts/.dtsi)的更多细节,请参考:我们暂不关心除PWM以外的模块配置,可以看到,
pan108xxb5_evb.dts文件第 172~175 行描述了一个PWM0模块的配置:... &pwm0 { pinctrl-0 = <&p1_0_pwm0_ch4 &p1_1_pwm0_ch5 &p1_6_pwm0_ch6>; status = "okay"; }; ...
其含义如下:
第一行
&pwm0表示,当前配置文件中对pwm0中属性值的修改会更新默认的(名为pan1080.dtsi)配置文件中的值,亦即,若本次更新的属性不在默认配置文件中,则为此属性赋予一个值;若本次更新的属性已经在默认配置文件中已经有一个值,则覆盖此属性的默认值;第二行
pinctrl-0表示,修改当前pwm0模块的 PINMUX 配置,其中尖括号中:&p1_0_pwm0_ch4表示将芯片P10引脚的 PINMUX 切换为PWM0 Channel 4功能;&p1_1_pwm0_ch5表示将芯片P11引脚的 PINMUX 切换为PWM0 Channel 5功能;&p1_6_pwm0_ch6表示将芯片P16引脚的 PINMUX 切换为PWM0 Channel 6功能;
第三行
status = "okay"表示,在系统初始化过程中,使能 DeviceTree 中对当前PWM模块的各项参数配置;
由于我们的规划是使用
PWM0 Channel 6从芯片P16引脚输出方波,而此处已经配置好,因此 DTS 文件中我们无需做任何改动。
4.2.3 UART 模块配置¶
我们希望使用 PAN1080 SoC 的UART模块输出 Log 日志到 PC,为此我们需要明确:
使用哪个 UART 模块(PAN1080 SoC 中内置了 2 个 UART 模块,分别为
UART0、UART1)UART Tx/Rx 分别映射到 SoC 的哪个引脚
如何与 PC 通信
PAN1080 EVB 底板中提供了一个 USB 转 UART 的模块电路,其可以很方便地通过跳线帽与 PAN1080 SoC 的P00(UART0 TX)、P01(UART0 RX)相连,这里我们就使用这种方式与 PC 通信。
使用跳线帽将 EVB 底板(左侧)的 USB 转 UART 模块的 2 个通信排针连接至 PAN1080 SoC:
将 TX0 引脚连接至 P00
将 RX0 引脚连接至 P01
再次在 VS Code 中打开板级 DeviceTree 文件
pan108xxb5_evb.dts,我们可以看到其中已经有了一些与UART 有关的配置:... chosen { zephyr,console = &uart0; zephyr,shell-uart = &uart0; zephyr,bt-mon-uart = &uart0; zephyr,bt-c2h-uart = &uart0; ... }; soc { pin-controller@40030000 { /* port, pin, pinmux_name, pinmux_sel [, flag1, ... ] */ DT_PAN_PINS(p0, 1, uart0_rx, PAN1080_PIN_FUNC_P01_UART0_RX, input-enable); }; }; ... &uart0 { current-speed = <921600>; pinctrl-0 = <&p0_0_uart0_tx &p0_1_uart0_rx>; status = "okay"; }; ...
其含义如下:
chosen节点描述了 Zephyr OS 用到的硬件模块与实际硬件的映射关系:zephyr,console = &uart0表示将 Zephyr Console 模块配置为使用UART0通信,我们此次向 UART 打印 LED 状态消息即使用此方式;zephyr,shell-uart = &uart0、zephyr,bt-mon-uart = &uart0、zephyr,bt-c2h-uart = &uart0均与本文内容无关,这里不做详细介绍,只需了解我们将 Zephyr 所有用到的串口均默认映射到了PAN1080 SoC 的UART0模块即可;
soc节点描述了芯片级的硬件配置信息:pin-controller@40030000是一个子节点,代表 PAN1080 SoC 的 PINMUX(MFP)模块;DT_PAN_PINS(p0, 1, uart0_rx, PAN1080_PIN_FUNC_P00_UART0_RX, input-enable)用来辅助配置UART0的 PINMUX 参数;其中,此配置的前 4 个参数表示我们将芯片P01引脚的 PINMUX 切换为 UART0 RX 功能,最后一个参数表示辅助配置参数,这里input-enable表示打开此引脚的数字信号输入功能;注1:除
input-enable参数外,此处还可以配置bias-pull-up以使用当前引脚的内部上拉电阻,或配置bias-pull-down以使用当前引脚的内部下拉电阻;注2:此处的 PINMUX 配置不是必须的,只有在需要打开某个引脚数字信号输入功能或内部上拉/下拉电阻功能的时候,才应该在此处进行配置,并且配置的引脚功能应当与对应外设模块中的
pinctrl-0中的配置一致,例如:我们在 DeviceTree 的
uart0节点中将Tx功能配置到了P00引脚,将Rx功能配置到了P01引脚,因此我们需要在soc/pin-controller节点中将P01引脚的数字信号输入功能打开,而P00为数字信号输出引脚,这里无需将其数字输入功能打开;如果我们使用
I2C模块,则由于 I2C 协议要求有上拉电阻,因此我们可以配置bias-pull-up参数以使用 SoC 内部上拉电阻;如果我们将I2C模块配置为 Slave,则由于SCL和SDA两根线均为输入信号,因此还需要配置input-enable参数以打开这两个引脚的数字信号输入功能;
&uart0表示,修改uart0节点中的属性,且其中的修改会更新默认配置文件(名为pan1080.dtsi)中的值:current-speed = <921600>表示,波特率配置为921600;pinctrl-0 = <&p0_0_uart0_tx &p0_1_uart0_rx>表示:将芯片
P00引脚的 PINMUX 切换为 UART1 TX 功能;将芯片
P01引脚的 PINMUX 切换为 UART1 RX 功能(与soc/pin-controller节点中的配置一致);
status = "okay"表示,在系统初始化过程中,使能 DeviceTree 中对当前UART模块的各项参数配置;
从 dts 文件中可知,SDK 中对于 UART 的配置已经与我们在 EVB 板中的接线一致,因此无需再做修改。
4.3 修改代码¶
下面我们演示如何在 VS Code 环境下写 App 代码,实现预期功能。
4.3.1 使用PWM¶
Zephyr 提供了标准的 PWM API 接口(头文件位置:
01_SDK/zephyr/include/drivers/pwm.h),为了使用这些接口,我们需要先使能 Zephyr PWM Driver,方法是在 App 目录的prj.conf,增加一个 Config 项:CONFIG_PWM=y
增加后文件内容如图所示:
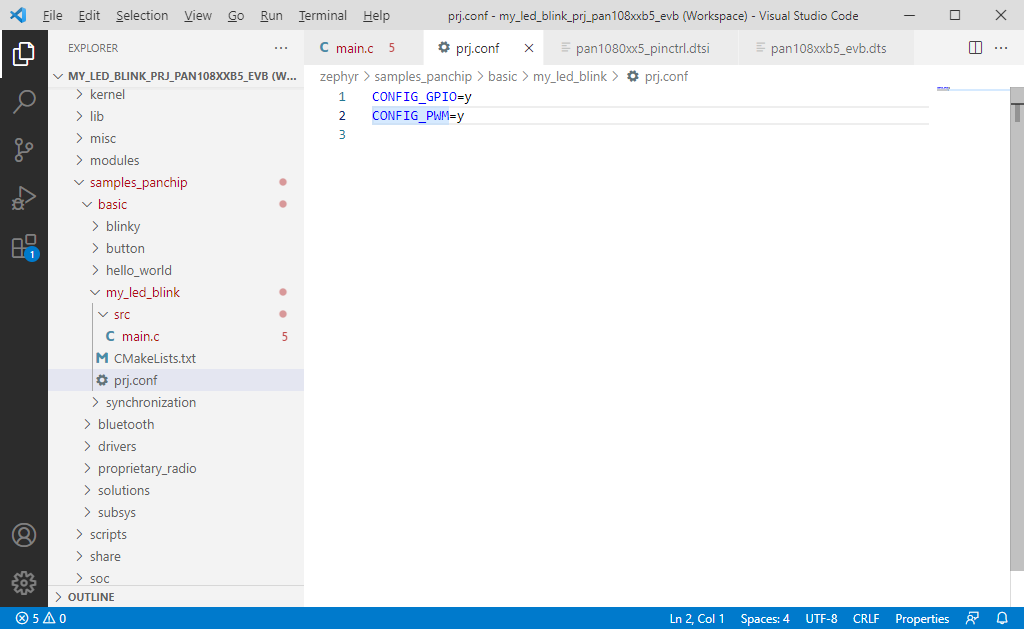
在prj.conf文件中使能PWM Driver¶
接着,我们在
main.c中,删除一些无关的代码,并增加 PWM 相关操作代码:/* * Copyright (c) 2021-2022 Shanghai Panchip Microelectronics Co.,Ltd. * * SPDX-License-Identifier: Apache-2.0 */ #include <zephyr.h> #include <device.h> #include <devicetree.h> #include <drivers/gpio.h> #include <drivers/pwm.h> void main(void) { const struct device *pwm_dev; bool flag = true; pwm_dev = DEVICE_DT_GET(DT_NODELABEL(pwm0)); if (pwm_dev == NULL) { return; } while (1) { if (flag == true) { flag = !flag; /* LED Blink, turn on 20ms and turn off 80ms in every 100ms */ pwm_pin_set_usec(pwm_dev, 6, 100000, 20000, PWM_POLARITY_NORMAL); } else { flag = !flag; /* LED Blink, turn on 80ms and turn off 20ms in every 100ms */ pwm_pin_set_usec(pwm_dev, 6, 100000, 80000, PWM_POLARITY_NORMAL); } k_msleep(3000); } }
点击 VS Code 的
Terminal菜单,选择Run Build Task...(或直接快捷键Ctrl + Shift + B),依次执行 Build 和 Flash 命令,将程序烧录至芯片中,即可观察到 LED 灯闪烁,且每 3s 切换一次闪烁频率。
4.3.2 使用 UART¶
我们可以直接使用 zephyr 提供的 printk 函数,将 Log 信息输出至串口,修改while(1)循环内的代码如下:
while (1) {
if (flag == true) {
flag = !flag;
/* LED Blink, turn on 20ms and turn off 80ms in every 100ms */
if (pwm_pin_set_usec(pwm_dev, 6, 100000, 20000, PWM_POLARITY_NORMAL) == 0) {
printk("LED Blink, turn-on 20ms and turn-off 80ms in every 100ms..");
} else {
printk("error occurs\n");
}
} else {
flag = !flag;
/* LED Blink, turn on 80ms and turn off 20ms in every 100ms */
if (pwm_pin_set_usec(pwm_dev, 6, 100000, 80000, PWM_POLARITY_NORMAL) == 0) {
printk("LED Blink, turn-on 80ms and turn-off 20ms in every 100ms..");
} else {
printk("error occurs\n");
}
}
k_msleep(3000);
}
重新编译烧录后,在 PC 中使用串口工具(如 SecureCRT)即可看到每 3s 打印一次消息:
修改后的 App Log 打印¶
5 芯片硬件校准参数¶
每颗量产的 PAN108x SoC 芯片,Panchip 均会在 CP/FT 阶段对其进行硬件参数校准(如各内部 LDO 的电压值、内部 RC 时钟频率、ADC 校准参数等等)。校准后的各项参数,会根据情况存储在 eFuse 或 Flash INFO 区域。
我们需要开启如下的 Config 配置以使能硬件校准功能:
CONFIG_SOC_HW_CALIBRATION=y
在 SDK v0.8.0 及之后的版本中,此 Config 配置默认是打开的
在 SDK v0.7.0 及之前的版本中,此 Config 配置默认是关闭的,我们需要在 App 层手动打开此配置
上述配置开启后,系统会在初始化阶段,自动将当前芯片的硬件校准参数,导入到各自的校准寄存器中以使它们生效。
另外,在校准参数的导入过程中,还会将芯片的一些其他信息读取出来,存入一个名为 otp 的全局结构体变量中,供 App 使用,例如:
从名为
otp.m.uid[8]的结构体成员中,可以获取当前芯片的唯一 ID (UID),共 8 字节从名为
otp.m.mac_addr[6]的结构体成员中,可以获取当前芯片的出厂 MAC Address,共 6 字节
注:以上校准参数是在常温下测试给出的,而实际使用中,过高或过低的温度均可能影响芯片的性能:例如,对于 DeepSleep 低功耗唤醒功能,当温度低于 0℃ 后,默认的 LDO 校准参数可能不足以使芯片正常唤醒,这时候我们可以另外开启自动校准 LDO 的功能:
CONFIG_SOC_LDO_CALIBRATION=y,此特性开启后,系统会每隔 10s 测量一次当前的芯片温度,若发现温度已降至 0℃ 附近,则重新配置 LDO 的校准参数,已确保低功耗唤醒功能正常(代价是低功耗状态下的功耗可能会变大)。
6 RF PHY 配置选择¶
我们在开发 BLE 或 2.4G 应用的时候,需要根据实际需求选择不同的 RF PHY 配置。目前 SDK 中提供了几种不同场景下可用的 RF PHY 配置,我们可以在 App 的prj.conf文件中使用名为CONFIG_BT_CTLR_AGC_MODE的 CONFIG 进行选择。
目前 SDK 支持 5 种不同的 RF PHY 配置:
CONFIG_BT_CTLR_AGC_MODE |
Description |
|---|---|
0 |
BLE应用,运动健康应用,RX灵敏度较高 |
1 |
BLE应用,RSSI精度不高 |
2 |
2.4G应用,发送/接收端均为PAN1080,如2.4G游戏键鼠 |
3 |
BLE应用,RSSI精度和抗干扰性高 |
4 |
2.4G应用,发送/接收端有一端为NRF芯片,对距离、收包率、抗干扰等性能有一定要求 |
7 系统启动与睡眠唤醒时间¶
系统启动时间:
启动阶段 |
所需时间 |
|---|---|
程序从 Bootloader 执行至 App |
6.3 ms |
程序从 App 初始化执行至 main() 函数 |
9.5 ms |
芯片睡眠唤醒时间:
低功耗模式 |
睡眠唤醒所需时间 |
|---|---|
Sleep Mode |
小于 1 us |
DeepSleep Mode |
300 us 左右 |
Standby Mode 0/1 |
1 ~ 2 ms(不包括软件重新初始化时间) |
注:以上时间基于 Zephyr Bluetooth Peripheral HR Clock XTL Sample 实测得出,不同 App 工程和配置下,系统启动时间与睡眠唤醒时间均可能会有所差异。
8 芯片供电相关配置¶
PAN108x SoC 规格书中给出了芯片工作电压范围在 1.8v ~ 3.7v 之间,且支持内部 DCDC、支持低电压检测等功能。对应地,在软件 SDK 中,也有一些与芯片供电相关的 Config,需要在开发过程中正确配置,相关配置定义位于 zephyr/soc/arm/panchip/pan1080/Kconfig.soc。
8.1 使能 DCDC 供电¶
CONFIG_SOC_DCDC_PAN1080(布尔类型): 芯片上电默认的供电模式为 LDO 模式,打开此配置后可切换到 DCDC 模式,从而降低芯片动态功耗。需要注意的是,内部 DCDC 模块需要搭配相关外围电路(如电感等),详见PAN108x 硬件参考设计文档中的相关介绍。另外,芯片内部 DCDC 在 3.3v 左右的电源电压下有最高的转换效率,若芯片供电电压小于 2v,则 DCDC 转换效率会下降,甚至可能会出现功耗高于 LDO 模式的情况。
8.2 修改 DVDD 电压¶
CONFIG_SOC_INCREASE_HLDO_CALIB_CODE(整数类型,范围 0 ~ 8): 每颗 PAN108x 量产芯片工作状态下的 DVDD 电压(即 HLDO 电压)均会被校准到 1.2v,这是芯片内部数字模块供电电压的典型值,更改此配置,可以将芯片 HLDO 电压抬高到至多 1.35v。这在某些应用场景下是必要的,例如,若使用中给芯片 Vbat 供电电压高于 3.5v,则需要将 HLDO 电压抬高到 1.3v(对应配置CONFIG_SOC_INCREASE_HLDO_CALIB_CODE=4),否则可能会出现芯片工作不稳定(如程序跑飞)的问题。CONFIG_SOC_INCREASE_LLDO_CALIB_CODE(整数类型,范围 0 ~ 3): 每颗 PAN108x 量产芯片 DeepSleep 低功耗状态下的 DVDD 电压(即 LLDO 电压)均会被校准到 0.7v 左右,用于给低功耗状态下的数字模块保电,更改此配置,可以将芯片 LLDO 电压抬高到至多 0.9v 左右。这在某些场景下是必要的,例如,若希望开启 APB HW Timer 的 DeepSleep 唤醒功能,则芯片默认的 LLDO 电压可能不够,此时可抬高 LLDO 电压(CONFIG_SOC_INCREASE_LLDO_CALIB_CODE=1)以确保 Timer 唤醒功能正常,此情况在 DeepSleep Timer Wakeup 例程文档中的 Config 配置说明中也有相关介绍。
8.3 开启 LVR(低电压复位)功能¶
芯片内置 LVR (Low Voltage Reset) 低电压复位功能,复位阈值电压约 1.9v。LVR 功能默认已经在 Bootloader 中开启,当芯片 Vbat 供电电压小于此阈值电压时,芯片会切换到复位状态,直到 Vbat 供电电压重新恢复到此阈值电压以上,芯片才会重新回到 Active 工作状态(除 LVR 本身以外的所有硬件模块均被复位,程序重新从起始地址开始执行)。
CONFIG_BOOT_LVR_DISABLE(布尔类型): 在 PAN108x ZDK 中,LVR 功能在默认的 Bootloader 中是开启的(通过 MCUBoot 的 Config 配置CONFIG_BOOT_LVR_OPEN使能),为避免芯片在电压过低的状况下工作异常,我们不建议关闭 LVR 功能,若确有此需求,在 App 工程中可以通过配置CONFIG_BOOT_LVR_DISABLE=y的方式将 LVR 关闭。
注1:PAN108x 芯片支持的最低工作电压为 1.8v,但由于 SDK 中在 Bootloader 中默认开启了 LVR 功能,因此实际芯片供电应在 1.9v 以上(建议 2v 以上)以防止触发 LVR 导致芯片无法正常工作。
注2:若项目中有频繁的 Flash 擦写操作,并且芯片可能会有频繁的上下电操作(即 Vbat 电压会经常处于 1.9v 附近),则为确保 Flash 数据稳定,推荐使能检测阈值电压更高且可配的 BOD(Brown-Out Detect,欠压监测)功能。
8.4 开启 BOD(欠压监测)功能¶
芯片内置 BOD (Brown-Out Detect) 欠压监测功能,监测阈值电压可配置(共 6 个电压档位),当芯片 Vbat 电压越过阈值电压(升高或降低)的时候,可令芯片产生中断或直接复位(软件可配置)。BOD 功能默认是关闭的,需通过软件将其开启。
CONFIG_BOD_ENABLE(布尔类型): 在系统初始化阶段使能 BOD 欠压监测功能。BOD 工作模式配置(从两种模式中二选一):
CONFIG_BOD_MODE_INTERRUPT(布尔类型): 配置 BOD 工作模式为 Interrupt 中断模式,当芯片 Vbat 电压升高到阈值电压以上或降低到阈值电压以下时,均可产生 BOD 中断;需要注意的是当 Vbat 电压降到阈值电压以下时,BOD 中断会一直反复触发,直到 Vbat 电压升高到阈值电压以上CONFIG_BOD_MODE_RESET(布尔类型): 配置 BOD 工作模式为 Reset 复位模式,当芯片 Vbat 电压降低到阈值电压以下时,芯片会切换到复位状态,直到 Vbat 供电电压重新恢复到此阈值电压以上,芯片才会重新回到 Active 工作状态(除 BOD 本身以外的所有硬件模块均被复位,程序重新从起始地址开始执行)
BOD 触发阈值电压配置(有迟滞特性,下降过程阈值电压比上升过程阈值电压低 100mV ~ 150mV):
CONFIG_BOD_TRIGGER_VOLTAGE_FALLING_2V05_RISING_2V15(布尔类型): 配置 BOD 触发阈值电压为:Vbat 下降过程阈值电压 2.05v (±50mV),Vbat 上升过程阈值电压 2.15v (±50mV)CONFIG_BOD_TRIGGER_VOLTAGE_FALLING_2V25_RISING_2V35(布尔类型): 配置 BOD 触发阈值电压为:Vbat 下降过程阈值电压 2.25v (±50mV),Vbat 上升过程阈值电压 2.35v (±50mV)CONFIG_BOD_TRIGGER_VOLTAGE_FALLING_2V50_RISING_2V60(布尔类型): 配置 BOD 触发阈值电压为:Vbat 下降过程阈值电压 2.50v (±50mV),Vbat 上升过程阈值电压 2.60v (±50mV)CONFIG_BOD_TRIGGER_VOLTAGE_FALLING_2V70_RISING_2V80(布尔类型): 配置 BOD 触发阈值电压为:Vbat 下降过程阈值电压 2.70v (±50mV),Vbat 上升过程阈值电压 2.80v (±50mV)CONFIG_BOD_TRIGGER_VOLTAGE_FALLING_2V90_RISING_3V05(布尔类型): 配置 BOD 触发阈值电压为:Vbat 下降过程阈值电压 2.90v (±50mV),Vbat 上升过程阈值电压 3.05v (±50mV)CONFIG_BOD_TRIGGER_VOLTAGE_FALLING_3V15_RISING_3V30(布尔类型): 配置 BOD 触发阈值电压为:Vbat 下降过程阈值电压 3.15v (±50mV),Vbat 上升过程阈值电压 3.30v (±50mV)
BOD 去抖时间配置(时钟源为 AHB 时钟,单位为 Cycles):
CONFIG_BOD_DEBOUNCE_TIME_16_CYCLES(布尔类型): 配置 BOD 去抖时间为 16 个 AHB 时钟,实际去抖时间约为 330ns (@48MHz) / 250ns (@64MHz)CONFIG_BOD_DEBOUNCE_TIME_128_CYCLES(布尔类型): 配置 BOD 去抖时间为 128 个 AHB 时钟,实际去抖时间约为 2.6us (@48MHz) / 2us (@64MHz)CONFIG_BOD_DEBOUNCE_TIME_512_CYCLES(布尔类型): 配置 BOD 去抖时间为 512 个 AHB 时钟,实际去抖时间约为 10us (@48MHz) / 8us (@64MHz)CONFIG_BOD_DEBOUNCE_TIME_2048_CYCLES(布尔类型): 配置 BOD 去抖时间为 2048 个 AHB 时钟,实际去抖时间约为 40us (@48MHz) / 32us (@64MHz)CONFIG_BOD_DEBOUNCE_TIME_8192_CYCLES(布尔类型): 配置 BOD 去抖时间为 8192 个 AHB 时钟,实际去抖时间约为 170us (@48MHz) / 128us (@64MHz)CONFIG_BOD_DEBOUNCE_TIME_32768_CYCLES(布尔类型): 配置 BOD 去抖时间为 32768 个 AHB 时钟,实际去抖时间约为 680us (@48MHz) / 512us (@64MHz)
9 芯片温度检测¶
PAN108x SoC 芯片自带ADC温度检测通道,采集ADC温度检测通道的数据并通过FT后存储的线性参数可以检测当前SoC温度。
我们需要开启如下的 Config 配置以使能温度检测功能:
CONFIG_SOC_TEMPERATURE_DETECTION=y
CONFIG_TEMPERATURE_CHANNEL_SAMPLE_COUNT=16(默认值16,ADC采集16次后取平均值)
CONFIG_TEMPERATURE_DETECT_TIME_INTERVAL=2000(默认值1000,ADC采集间隔)
在 SDK v1.0.0 之前的版本中,此 Config 配置是不生效的
在 SDK v1.0.0及之后的版本中,此 Config 配置默认是关闭的,我们需要在 App 层手动打开此配置
CONFIG_SOC_TEMPERATURE_DETECTION配置开启后,系统会在初始化阶段,自动开启温度检测功能,检测间隔为CONFIG_TEMPERATURE_DETECT_TIME_INTERVAL配置时间,单位为ms。
注1:CONFIG_SOC_TEMPERATURE_DETECTION使能后,ADC使用了互斥信号量,目的是防止应用程序在正常使用adc时,温度检测抢占线程导致出现异常,因此在应用程序中使用adc需要添加互斥信号量lock与unlock操作以确保线程调度正常。
注2:互斥信号量为adc_ch_lock。
注3:开启温度检测后,温度检测adc数据采集默认参考电压使用低压档adc vbg 1.2V,每次检测开始时会使能adc,完成后会关闭adc并同时关闭adc的时钟,在使能阶段会有一个200us的延时。
注4:如果应用程序使用了adc高压档位采集,由于温度检测使用低压档位采集,那么涉及高低压档位切换的过程,通常情况下参考电压建立过程需要一定时间,这里为了缩短这个时间,程序中有将电流相关配置设置为最大,并在温度检测结束后还原,因此在温度检测过程中功耗会比正常adc检测过程相对较大。
10 更多相关文档¶
Zephyr Devicetree 与 Kconfig 配置指南:介绍 Zephyr Kconfig 配置的相关技巧
Zephyr DeviceTree APIs:Zephyr官方对于DeviceTree接口的详细介绍
Zephyr Peripheral APIs:Zephyr官方提供的外设Driver API接口详细介绍