快速上手 SoC App 开发¶
本文演示如何新建一个简单的App工程,并举例说明如何在App工程中操作PAN1080 EVB开发板的外设模块。
2 参考相关例程¶
SDK中提供了一些例程(位于01_SDK/zephyr/samples_panchip目录),可以直接编译下载到EVB开发板上执行,包括多线程打印消息、LED闪灯、以及蓝牙相关例程等等。
在进行开发之前,建议先看一下相关的例程和文档,熟悉Zephyr OS的基本框架;然后实际将这些例程编译烧录至EVB开发板中查看运行效果,同时进一步熟悉开发环境的使用。
SDK例程目录¶
另外,SDK中也提供了一些外设模块的测试用例(位于01_SDK/zephyr/tests_panchip目录),用于测试外设Driver功能是否正常。阅读这些测试用例代码,也有助于熟悉Zephyr外设 Driver的使用方法。
SDK测试用例目录¶
3 新建一个App工程¶
假设我们希望创建一个名为my_led_blink的App工程,使用PWM的方式将EVB开发板上的红色LED灯点亮并令其闪烁,要求:
首先,LED灯以5Hz的频率闪烁,持续5s
重复上述闪烁规则
每次闪烁频率切换的时候,均向UART串口打印闪烁频率信息
下面我们详细讲解如何新建一个工程来实现上述需求。
3.1 从例程中拷贝一份相似的工程¶
例程blinky(位置:01_SDK/zephyr/samples_panchip/basic/blinky目录)演示了如何使用GPIO的方式点亮LED并令其每隔1s闪烁一次。
我们以此例程为基础进行修改:
首先,拷贝一份
blinky并将其重命名为my_led_blink:
拷贝一个现有的例程¶
打开
CMakeList.txt,将第5行project参数修改为新的项目名称my_led_blink:# SPDX-License-Identifier: Apache-2.0 cmake_minimum_required(VERSION 3.20.0) find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE}) project(my_led_blink) target_sources(app PRIVATE src/main.c)
注:本App工程目录中,必要的文件为:
src\main.c: 主程序代码CMakeList.txt: cmake 文件prj.conf: 项目配置文件
其它两个文件不是必须的(在本示例中我们可以直接将其删除):
README.rst: 例程说明文件sample.yaml: 用于Zephyr单元测试的信息描述文件
然后,拷贝一份名为
blinky.bat的 Quick Build 脚本(位于01_SDK/quick_build_samples/basic目录),用于执行编译烧录;我们同样将其重命名为与App工程相同,即my_led_blink.bat:注:脚本内容无需修改,其会根据脚本文件名自动关联同名的App工程。

拷贝一个现有的quick build脚本¶
最后,确认新增的
my_led_blink.bat可以正常编译、烧录、运行新增的my_led_blink工程:将EVB开发板通过USB2(
USB to UART)接口供电,并确认:JLink SWD正确连接至EVB板(
P46:ICEK,P47:ICED)使用跳线帽将EVB底板(左上侧)的LED/红外发射共用电路的排针连接至PAN1080 SoC(
P21:FRTX)
双击
my_led_blink.bat脚本,执行第一次编译,成功后,会显示成功生成名为zephyr.elf的输出文件,同时显示当前工程的FLASH和SRAM占用信息: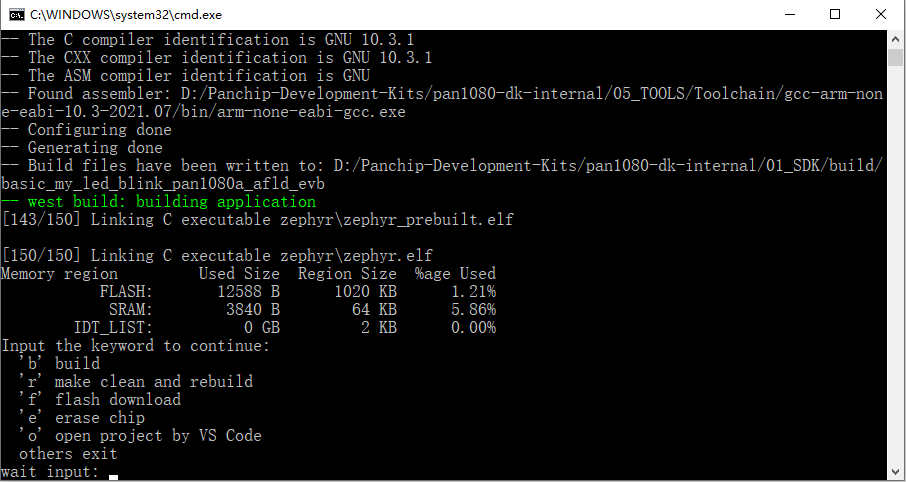
运行修改后的quick build脚本¶
输入指令
f并回车,将程序烧录至芯片Flash中: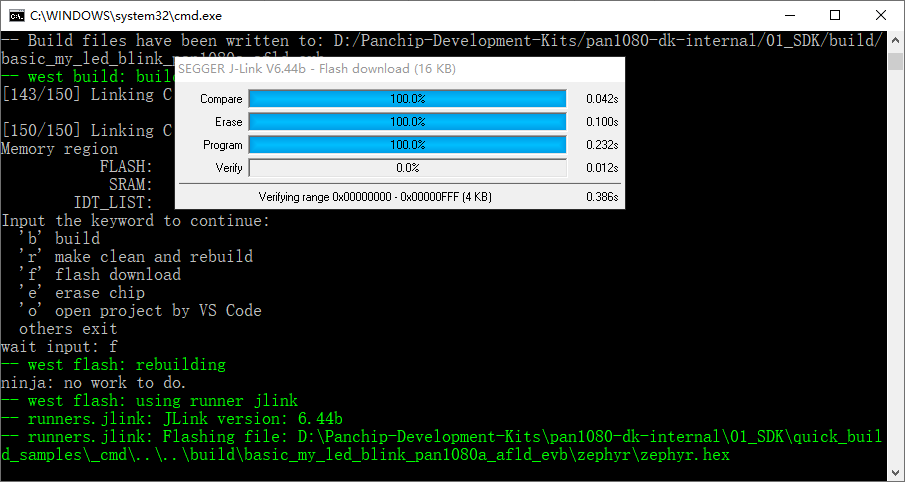
烧录程序¶
烧录成功后,即可观察到EVB底板左上角的红色LED灯以1Hz的频率不断闪烁:

观察程序运行结果¶
最后,我们输入指令
o,启动VS Code,后续代码修改与编译烧录调试均可在VS Code环境下进行: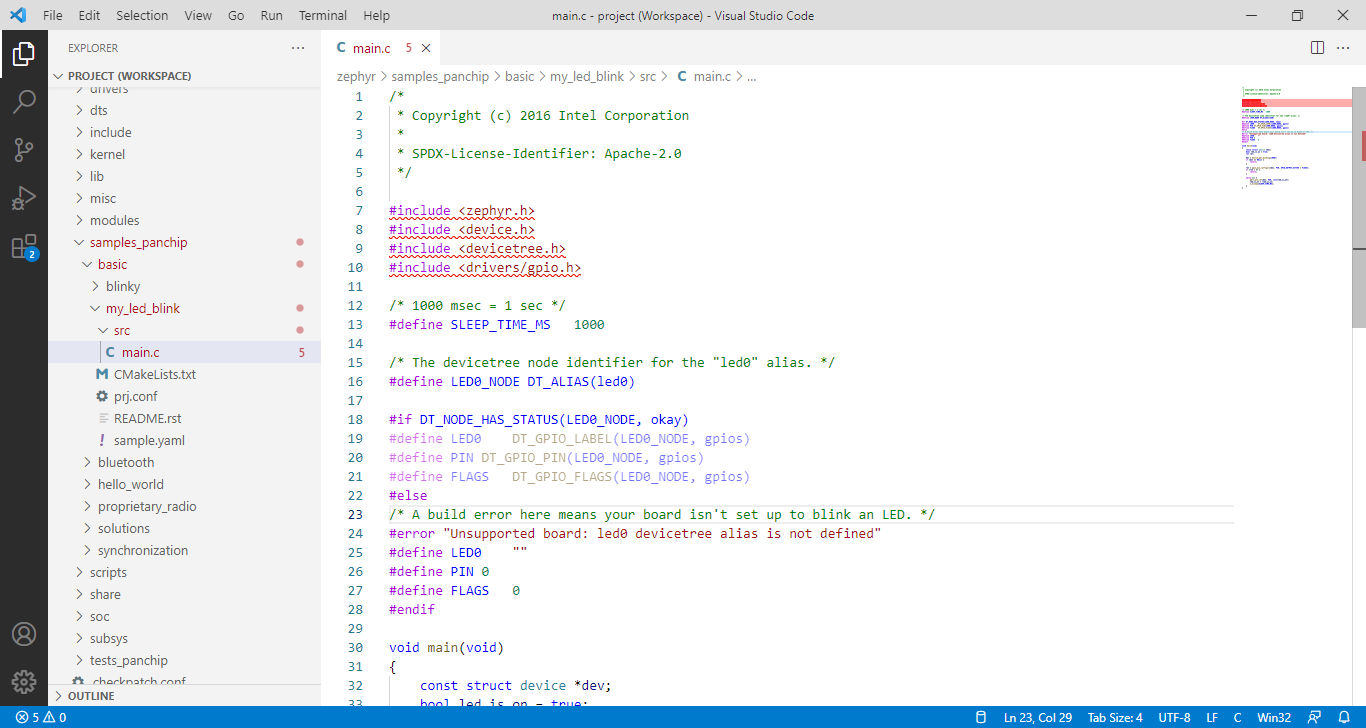
启动VS Code¶
3.2 硬件资源规划¶
3.2.1 时钟与电源配置¶
在实际项目中我们需要确定SoC时钟源、内部各模块的时钟配置、电源选择等事项。但这里我们直接使用EVB板开发,因此暂不关注这些内容,使用EVB板的默认配置参数即可。
我们通过PC使用MicroUSB数据线连接至EVB开发板的USB to UART接口(如图蓝色圆框所示),为开发板提供5V电源;同时确认开发板相关电源跳线(如图红色方框所示)连接正确:
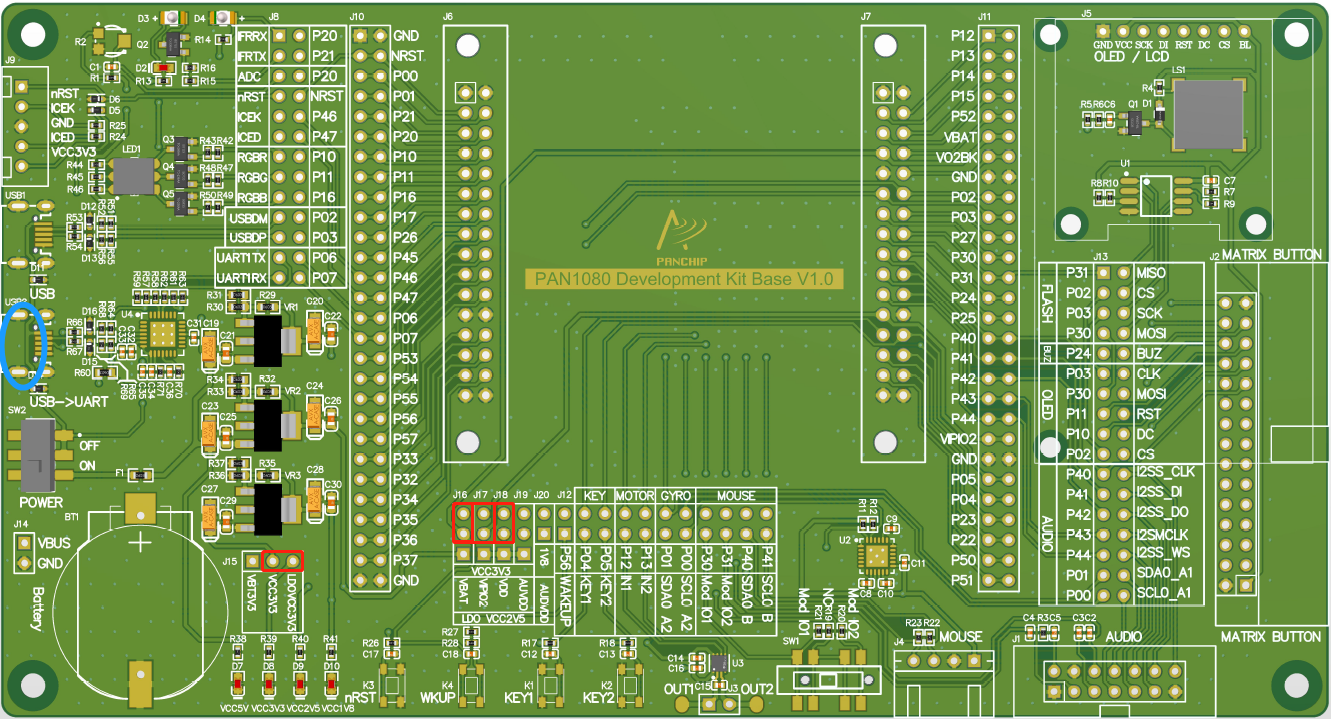
EVB时钟域电源接线示意图¶
3.2.2 PWM模块配置¶
我们使用PAN1080 SoC的PWM模块控制EVB底板上的LED灯,为此我们需要规划:
使用哪个PWM模块的哪个输出通道(PAN1080 SoC中内置了3个硬件PWM模块,分别为
PWM0、PWM1、PWM2,每个模块均有8个通道)将PWM波形输出到SoC的哪个引脚
需要注意的是,由于PAN1080 SoC的每个引脚最多只能配置成预设的8个功能之一,因此我们在规划引脚资源的时候,要查阅各个引脚的PINMUX定义,从中找到合适的引脚使用。
我们可以从PAN1080 Development Kit中的如下几个文件的任意一个中找到PAN1080 SoC的PINMUX引脚定义:
01_SDK/zephyr/dts/arm/panchip/pan1080/pan1080a_afld_pinctrl.dtsi01_SDK/zephyr/include/drivers/pinmux/pinmux_pan1080.h04_DOC/05_soc_manual/PAN1080 Datasheet.pdf或04_DOC/05_soc_manual/PAN1080 产品说明书.pdf
这里,我们直接从VS Code中打开
pan1080a_afld_pinctrl.dtsi文件(按快捷键Ctrl+P,输入文件名即可):
打开pan1080a_afld_pinctrl.dtsi文件¶
由于当前EVB底板上的LED灯已经与
P21引脚相连,我们先查找P21引脚的PINMUX定义,看是否有PWM功能;查阅后发现其并没有PWM功能,但相邻的P22引脚,有一个pwm1_ch4 (PWM1 Channel 4)的定义,可以供我们使用: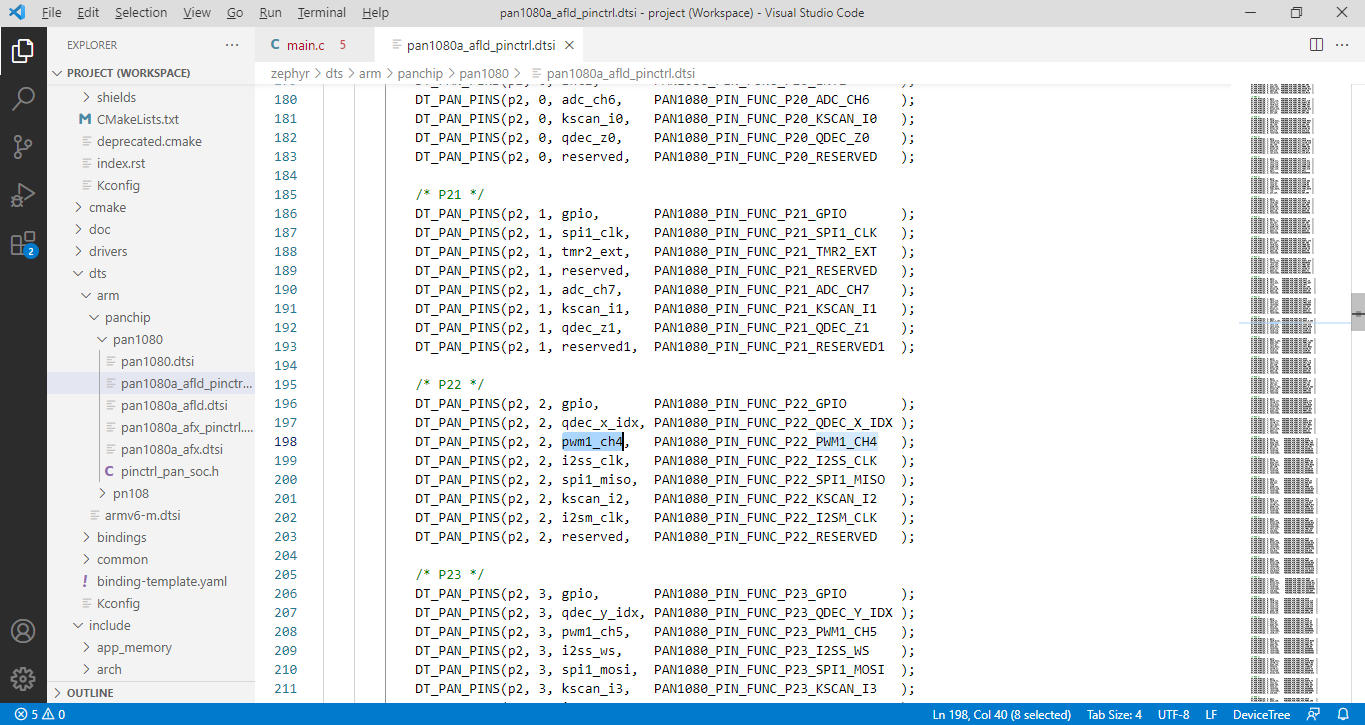
pan1080a_afld_pinctrl.dtsi文件内容¶
在EVB底板上,将
P21排针与FRTX排针连接的跳线帽拔出,另使用一根杜邦线将P22排针与FRTX排针相连: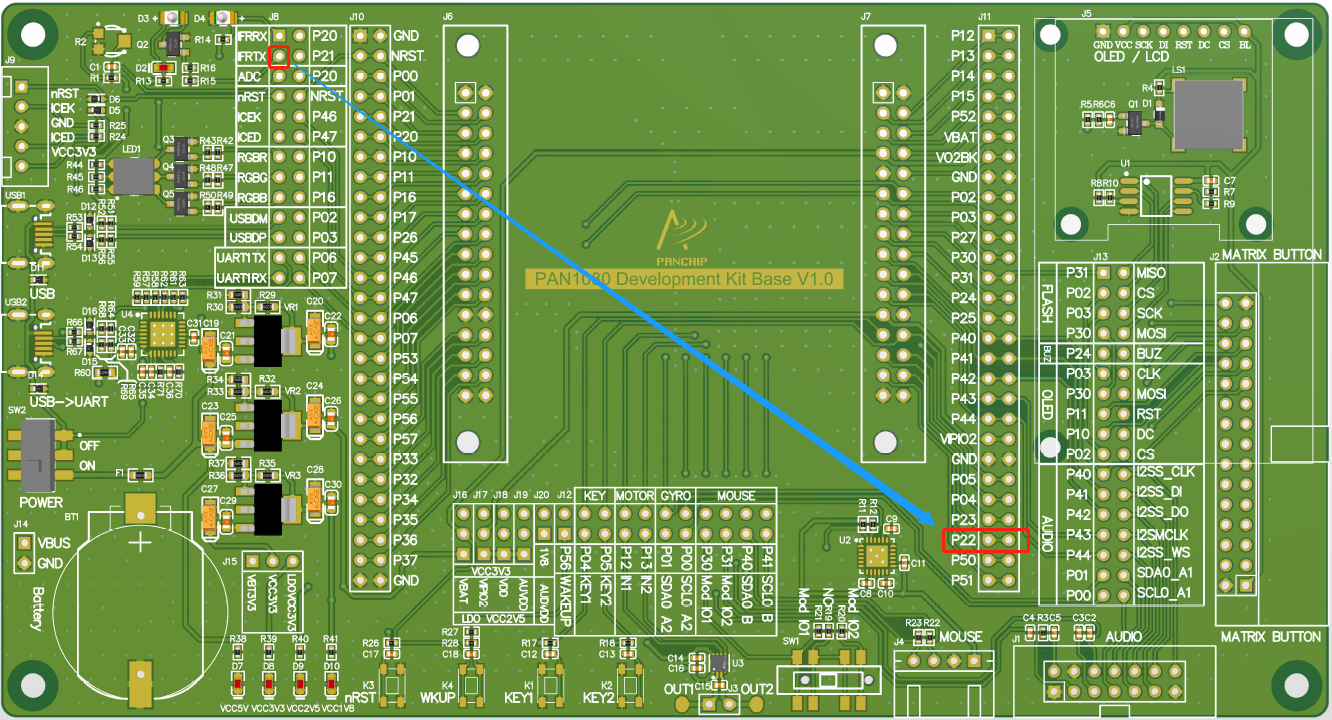
修改LED跳线连接引脚¶
为使我们规划的硬件资源生效,我们需要修改SDK中的板级DeviceTree文件。
从VS Code中打开名为
pan1080a_afld_evb.dts的文件(按快捷键Ctrl+P,输入文件名即可):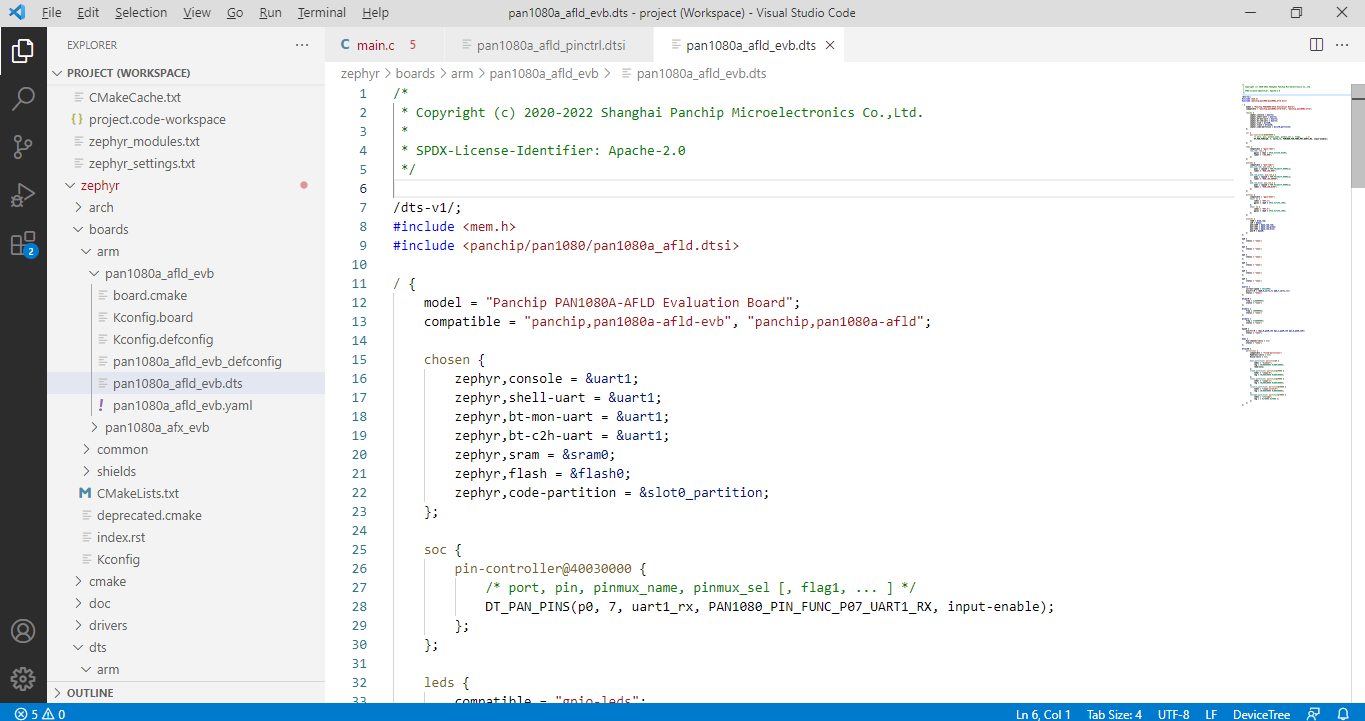
打开pan1080a_afld_evb.dts文件¶
此文件中描述了关于PAN1080A-AFLD EVB的所有板级硬件配置信息,这些配置保证了我们可以使用EVB开发板成功运行SDK中的所有例程(
samples_panchip)和测试用例(tests_panchip)。关于Zephyr DeviceTree(
.dts/.dtsi)的更多细节,请参考Zephyr官方文档:Introduction to devicetree我们暂不关心除PWM以外的模块配置,可以看到,
pan1080a_afld_evb.dts文件第123~126行描述了一个PWM0模块的配置:... &pwm0 { pinctrl-0 = <&p1_0_pwm0_ch4 &p1_1_pwm0_ch5 &p1_6_pwm0_ch6>; status = "okay"; }; ...
其含义如下:
第一行
&pwm0表示,当前配置文件中对pwm0中属性值的修改会更新默认配置文件(名为pan1080.dtsi)中的值,亦即,若本次更新的属性不在默认配置文件中,则为此属性赋予一个值;若本次更新的属性已经在默认配置文件中已经有一个值,则覆盖此属性的默认值;第二行
pinctrl-0表示,修改当前pwm模块的PINMUX配置,其中尖括号中:&p1_0_pwm0_ch4表示将芯片P10引脚的PINMUX切换为PWM0 Channel 4功能;&p1_1_pwm0_ch5表示将芯片P11引脚的PINMUX切换为PWM0 Channel 5功能;&p1_6_pwm0_ch6表示将芯片P16引脚的PINMUX切换为PWM0 Channel 6功能;
第三行
status = "okay"表示,在系统初始化过程中,使能DeviceTree中对当前PWM模块的各项参数配置;
由于我们的规划是使用
PWM1 Channel 4从芯片P22引脚输出方波,因此我们仿照上述对PWM0模块的描述,添加一个PWM1模块配置:... &pwm0 { pinctrl-0 = <&p1_0_pwm0_ch4 &p1_1_pwm0_ch5 &p1_6_pwm0_ch6>; status = "okay"; }; &pwm1 { pinctrl-0 = <&p2_2_pwm1_ch4>; status = "okay"; }; ...
3.2.3 UART模块配置¶
我们希望使用PAN1080 SoC的UART模块输出Log日志到PC,为此我们需要明确:
使用哪个UART模块(PAN1080 SoC中内置了2个UART模块,分别为
UART0、UART1)UART Tx/Rx分别映射到SoC的哪个引脚
如何与PC通信
PAN1080 EVB底板中提供了一个USB转UART的模块电路,其可以很方便地通过跳线帽与PAN1080 SoC的P06(UART1 TX)、P07(UART1 RX)相连,这里就采用这种方式与PC通信。
使用跳线帽将EVB底板(左上侧)的USB转UART模块的2个通信排针连接至PAN1080 SoC:
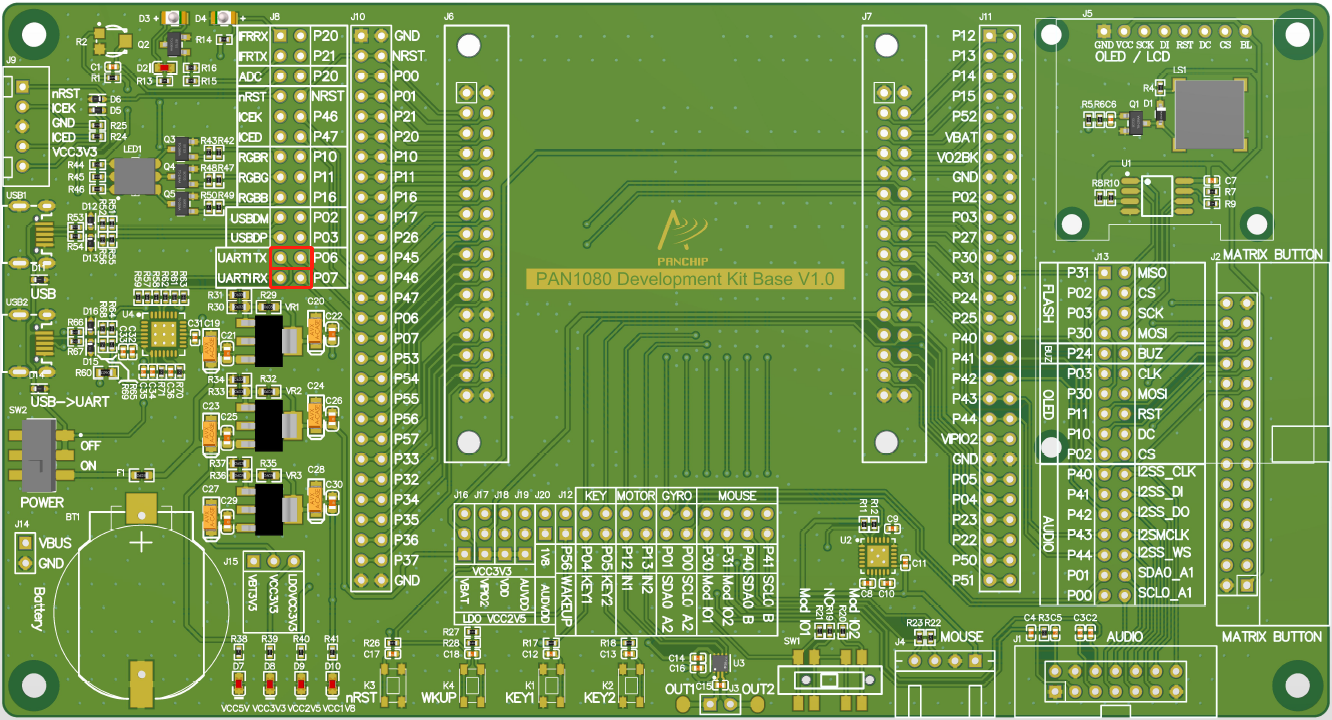
EVB USB转UART模块跳线连接示意图¶
再次在VS Code中打开板级DeviceTree文件
pan1080a_afld_evb.dts,我们可以看到其中已经有了一些与UART有关的配置:... chosen { zephyr,console = &uart1; zephyr,shell-uart = &uart1; zephyr,bt-mon-uart = &uart1; zephyr,bt-c2h-uart = &uart1; ... }; soc { pin-controller@40030000 { /* port, pin, pinmux_name, pinmux_sel [, flag1, ... ] */ DT_PAN_PINS(p0, 7, uart1_rx, PAN1080_PIN_FUNC_P07_UART1_RX, input-enable); }; }; ... &uart1 { current-speed = <921600>; pinctrl-0 = <&p0_6_uart1_tx &p0_7_uart1_rx>; status = "okay"; }; ...
其含义如下:
chosen节点描述了Zephyr OS用到的硬件模块与实际硬件的映射关系:zephyr,console = &uart1表示将Zephyr Console模块配置为使用UART1通信,我们此次向UART打印LED状态消息即使用此方式;zephyr,shell-uart = &uart1、zephyr,bt-mon-uart = &uart1、zephyr,bt-c2h-uart = &uart1均与本文内容无关,这里不做详细介绍,只需了解我们将Zephyr所有用到的串口均默认映射到了PAN1080 SoC的UART1模块即可;
soc节点描述了SoC级的硬件配置信息:pin-controller@40030000是一个子节点,代表PAN1080 SoC的PINMUX(MFP)模块;DT_PAN_PINS(p0, 7, uart1_rx, PAN1080_PIN_FUNC_P07_UART1_RX, input-enable)用来辅助配置UART1的PINMUX参数;其中,此配置的前4个参数表示我们将芯片P07引脚的PINMUX切换为UART1 RX功能,最后一个参数表示辅助配置参数,这里input-enable表示打开此引脚的数字信号输入功能;注1:除
input-enable参数外,此处还可以配置bias-pull-up以使用当前引脚的内部上拉电阻,或配置bias-pull-down以使用当前引脚的内部下拉电阻;注2:此处的PINMUX配置不是必须的,只有在需要打开某个引脚数字信号输入功能或内部上拉/下拉电阻功能的时候,才应该在此处进行配置,并且配置的引脚功能应当与对应外设模块中的
pinxtrl-0中的配置一致,例如:我们在DeviceTree的
uart1节点中将Tx功能配置到了P06引脚,将Rx功能配置到了P07引脚,因此我们需要在soc/pin-controller节点中将P07引脚的数字信号输入功能打开,但无需配置数字信号输出引脚P06;如果我们使用
I2C模块,则由于I2C协议要求有上拉电阻,因此我们可以配置bias-pull-up参数以使用SoC内部上拉电阻;如果我们将I2C模块配置为Slave,则由于SCL和SDA两根线均为输入信号,因此还需要配置input-enable参数以打开这两个引脚的数字信号输入功能;
&uart1表示,修改uart1节点中的属性,且其中的修改会更新默认配置文件(名为pan1080.dtsi)中的值:current-speed = <921600>表示,波特率配置为921600;pinctrl-0 = <&p0_6_uart1_tx &p0_7_uart1_rx>表示:将芯片
P06引脚的PINMUX切换为UART1 TX功能;将芯片
P07引脚的PINMUX切换为UART1 RX功能(与soc/pin-controller节点中的配置一致);
status = "okay"表示,在系统初始化过程中,使能DeviceTree中对当前UART模块的各项参数配置;
从dts文件中可知,SDK中对于UART的配置已经与我们在EVB板中的接线一致,因此无需再做修改。
3.3 修改代码¶
下面我们演示如何在VS Code环境下写App代码,实现预期功能。
3.3.1 使用PWM¶
Zephyr提供了标准的PWM API接口(头文件位置:
01_SDK/zephyr/include/drivers/pwm.h),为了使用这些接口,我们需要先使能Zephyr PWM Driver,方法是在App目录的prj.conf,增加一个Config项:CONFIG_PWM=y
增加后文件内容如图所示:
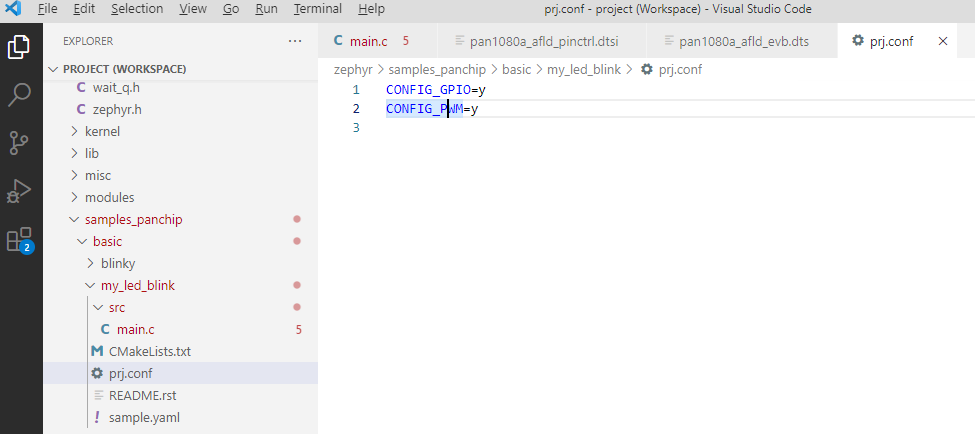
在prj.conf文件中使能PWM Driver¶
接着,我们在
main.c中,删除一些无关的代码,并增加PWM相关操作代码:/* * Copyright (c) 2021-2022 Shanghai Panchip Microelectronics Co.,Ltd. * * SPDX-License-Identifier: Apache-2.0 */ #include <zephyr.h> #include <device.h> #include <devicetree.h> #include <drivers/gpio.h> #include <drivers/pwm.h> void main(void) { const struct device *dev; dev = DEVICE_DT_GET(DT_NODELABEL(pwm1)); if (dev == NULL) { return; } while (1) { /* LED Blink 5Hz */ pwm_pin_set_usec(dev, 4, 200000, 100000, PWM_POLARITY_NORMAL); k_msleep(5000); } }
点击VS Code的
Terminal菜单,选择Run Build Task...(或直接快捷键Ctrl + Shift + B),依次执行Build和Flash命令,将程序烧录至芯片中,即可观察到LED灯以5Hz的频率闪烁。
4 更多相关文档¶
Zephyr Kconfig配置指南:介绍Zephyr Kconfig配置的相关技巧
Zephyr DeviceTree APIs:Zephyr官方对于DeviceTree接口的详细介绍
Zephyr Peripheral APIs:Zephyr官方提供的外设Driver API接口详细介绍