Driver: Pinmux¶
1 功能概述¶
pinmux sample演示了Zephyr PINMUX Driver在PAN1080 SoC上的使用方法,主要包括:
开启/关闭SoC内部上拉/下拉电阻通路开关
切换某个IO引脚的多功能引脚MFP (Multi-Function Pin) 功能配置
硬件上,PAN1080 PINMUX与GPIO是密切相关的,其框图如下所示:
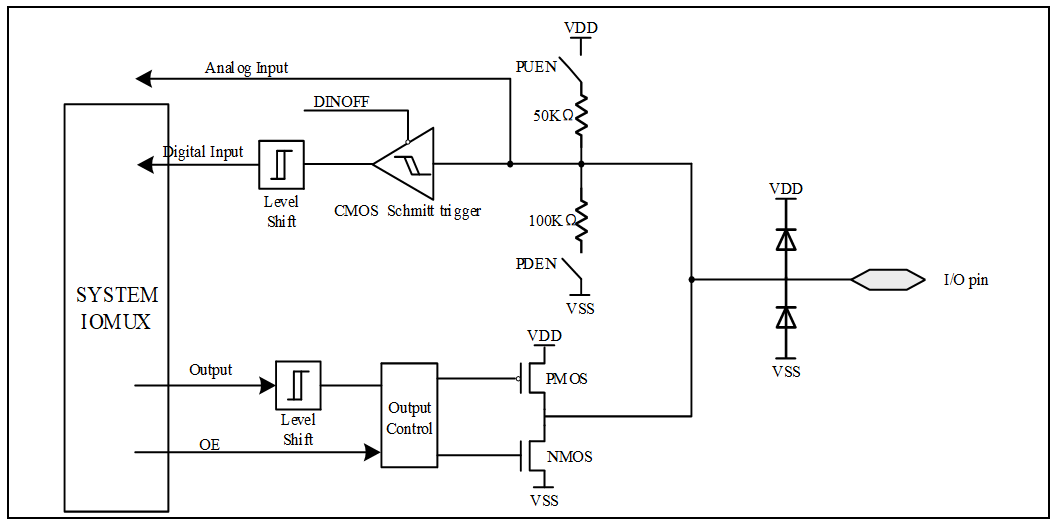
GPIO/PINMUX模块框图¶
其中与PINMUX相关的有:
PUEN对应PINMUX的上拉电阻通路开关PDEN对应PINMUX的下拉电阻通路开关DINOFF对应PINMUX的数字输入通路开关SYSTEM IOMUX对应PINMUX的多功能引脚MFP功能配置
2 环境准备¶
PAN1080 EVB一块
Micro USB线一条(用于供电和查看串口打印Log)
硬件接线:
使用USB线,将PC USB与EVB MicroUSB(USB->UART)相连
使用杜邦线将EVB上的:
UART1 TX与P06相连
UART1 RX与P07相连
PC软件: 串口调试助手(UartAssist)或终端工具(SecureCRT),波特率921600
3 编译和烧录¶
例程位置:zephyr\samples_panchip\drivers\pinmux
目前可使用ZAL工具或quick build脚本进行编译和下载。
脚本位置:quick_build_samples\drivers\pinmux.bat
打开脚本后默认会编译项目,编译完成时,可输入字符进行后续下载等操作:
Input the keyword to continue:
'b' build 编译项目
'r' make clean and rebuild 重新编译项目
'f' flash download 下载
'e' erase chip 擦除芯片
'o' open project by VS Code 打开 `VS Code`,可查看源码,执行编译下载等
others exit 退出
wait input:
4 演示说明¶
本例程包含2个示例,其中:
pinmux_pullup_pulldown_io_level()使用PINMUX API将一个GPIO的内部上拉电阻和下拉电阻分别使能,并通过GPIO Input功能检测线上的电平变化来确认上拉、下拉电阻是否使能成功;其涉及如下2个PINMUX API:pinmux_pin_pullup()
pinmux_pin_pulldown()
switch_uart_console_pinmux()使用PINMUX API将当前串口输出引脚从P06切换至P24;其涉及如下2个PINMUX API:pinmux_pin_get()
pinmux_pin_set()
4.1 示例1:使能SoC内部上拉与下拉电阻¶
确认GPIO P57引脚为悬空状态
当程序执行
pinmux_pullup_pulldown_io_level()函数时,会每隔500ms切换一次GPIO P57引脚的内部上下拉电阻,每次切换后均立刻使用GPIO检测IO线上的电平,然后向串口打印当前检测结果:Start to pull up and pull down GPIO P57.. Pull up, detected IO level: 1 Pull down, detected IO level: 0 Pull up, detected IO level: 1 Pull down, detected IO level: 0 Pull up, detected IO level: 1 Pull down, detected IO level: 0 Pull up, detected IO level: 1 Pull down, detected IO level: 0 Pull up, detected IO level: 1 Pull down, detected IO level: 0 Stopped.
4.2 示例2:切换SoC多功能引脚MFP功能¶
当程序执行
switch_uart_console_pinmux()函数时,其首先会先获取P06和P24引脚的当前的MFP (Multi-Function Pin) 配置:Before switch pinmux: - Pin function of P06 is: 0x00004000 - Pin function of P24 is: 0x00000000
此处打印的是引脚MFP配置的数字数字标识,其代表的含义可以从以下头文件中找到对应的含义:
include\drivers\pinmux\pinmux_pan1080.h
例如,当前
P06MFP配置的数字标识为0x00004000,我们查阅pinmux_pan1080.h中的P06引脚相关的MFP定义,在78行可看到其代表的含义是UART1_TX功能:#define PAN1080_PIN_FUNC_P06_UART1_TX 0x00004000UL同理可查得当前
P24的MFP配置(数字标识0x00000000)对应的MFP功能为GPIO:#define PAN1080_PIN_FUNC_P24_GPIO 0x00000000UL随后打印切换pinmux引脚的提示:
switching pinmux..
此时在20s内将EVB板上接在P06引脚上的杜邦线拔掉,将其再接到P24引脚上,即可看到串口继续打印如下消息:
After switch pinmux (loop_cnt = 6): - Pin function of P06 is: 0x00000000 - Pin function of P24 is: 0x00000010 After switch pinmux (loop_cnt = 5): - Pin function of P06 is: 0x00000000 - Pin function of P24 is: 0x00000010 After switch pinmux (loop_cnt = 4): - Pin function of P06 is: 0x00000000 - Pin function of P24 is: 0x00000010 After switch pinmux (loop_cnt = 3): - Pin function of P06 is: 0x00000000 - Pin function of P24 is: 0x00000010 After switch pinmux (loop_cnt = 2): - Pin function of P06 is: 0x00000000 - Pin function of P24 is: 0x00000010 After switch pinmux (loop_cnt = 1): - Pin function of P06 is: 0x00000000 - Pin function of P24 is: 0x00000010 Stopped.
此处可根据前面介绍的方法查询得知: 当前
P06的MFP配置(数字标识0x00000000)对应的MFP功能为GPIO:#define PAN1080_PIN_FUNC_P06_GPIO 0x00000000UL当前
P24的MFP配置(数字标识0x00000010)对应的MFP功能为UART1_TX:#define PAN1080_PIN_FUNC_P24_UART1_TX 0x00000010UL以上现象说明已经成功完成两个IO的MFP功能切换:
将
P06引脚由UART1 Tx功能切换为GPIO功能将
P24引脚由GPIO功能切换为UART1 Tx功能
5 开发者说明¶
5.1 使能PINMUX Driver¶
确保当前工程开启了如下config以使能Zephyr PINMUX Driver:
CONFIG_PINMUX=y
注:实际上,我们在EVB Board Configuration中已经默认开启了PINMUX功能,因此在App工程中将其使能已经是非必要操作。
5.2 API相关头文件位置¶
zephyr\include\drivers\pinmux.h:PINMUX API接口函数声明zephyr\include\drivers\pinmux\pinmux_panchip.h:Panchip SoC通用PINMUX宏定义,包括引脚编号、上拉使能/除能、下拉使能/除能、数字输入使能/除能等zephyr\include\drivers\pinmux\pinmux_pan1080.h:PAN1080 SoC所有引脚的MFP配置定义
5.3 其他配置SoC PINMUX参数的方法¶
除使用本例程介绍的PINMUX Driver以外,PAN1080还支持如下的方式修改SoC PINMUX的相关配置:
使用GPIO Driver API进行配置(可在运行时动态修改)
使用Devicetree进行配置(仅在系统初始化时配置一次)
5.3.1 使用GPIO Driver API配置PINMUX参数¶
GPIO Driver的gpio_pin_configure()接口支持配置SoC PINMUX的上拉电阻通路、下拉电阻通路以及数字输入通路。
具体可参考GPIO Sample中的介绍与演示。
5.3.2 使用Devicetree配置PINMUX参数¶
通过修改Zephyr Devicetree (.dts文件),可配置上拉电阻通路、下拉电阻通路、数字输入通路以及MFP引脚配置等PINMUX支持的参数。
此方式用于在系统初始化的时候配置某个外设的MFP引脚功能,如果需要,还可同时配置上拉、下拉或数字输入使能等功能。
例如,对于PAN1080 EVB来说,系统初始化的时候会默认将P06配置为UART1_TX功能,将P07配置为UART1_RX功能,就是通过配置Devicetree实现的。此处以pan1080a_afld_evb board为例说明如何配置:
在
zephyr\boards\arm\pan1080a_afld_evb\pan1080a_afld_evb.dts文件中,配置UART1模块的必要参数,并将PINMUX(即pinctrl-0属性)配置为p0_6_uart1_tx、p0_7_uart1_rx:... &uart1 { current-speed = <921600>; pinctrl-0 = <&p0_6_uart1_tx &p0_7_uart1_rx>; status = "okay"; }; ...
注:关于
pan1080a_afldSoC 支持的所有pinctrl-0属性引脚定义,可以从以下dts头文件中查阅:zephyr\dts\arm\panchip\pan1080\pan1080a_afld_pinctrl.dtsi
配置MFP引脚功能后,还需考虑是否要同时配置对应引脚的上拉、下拉或数字输入使能等功能。对于UART来说,Rx (
P07) 是输入引脚,因此需要开启数字输入功能,但无需开启上拉、下拉使能,方法是在soc/pin-controller@40030000节点中,使用DT_PAN_PINS()API接口重新配置此引脚的PINMUX,传入标识(Flag)参数input-enable,以开启P07引脚的数字输入功能:soc { pin-controller@40030000 { /* port, pin, pinmux_name, pinmux_sel [, flag1, ... ] */ ... DT_PAN_PINS(p0, 7, uart1_rx, PAN1080_PIN_FUNC_P07_UART1_RX, input-enable); ... }; };
注1:之所以说是重新配置
soc/pin-controller@40030000节点的引脚定义,原因是所有引脚均有其原始的定义(通常是不带Flag参数的);对于pan1080a_afldSoC来说,相关定义位于前面已经提到的dts头文件中:zephyr\dts\arm\panchip\pan1080\pan1080a_afld_pinctrl.dtsi
注2:pinmux dts中支持的所有标识(Flag)参数,均可从以下
dts-bindings文件中查阅:zephyr\dts\bindings\pinctrl\panchip,pan-pinctrl.yamldescription: | Panchip SoC Pinctrl node The Panchip SoC pins implements following pin configuration option: * bias-pull-up * bias-pull-down * input-enable These options define devicetree flags that are converted to SoC flags at PAN_PIN_FLAGS().
其中:
bias-pull-up表示使能上拉电阻通路;bias-pull-down表示使能下拉电阻通路;input-enable表示使能数字输入通路;
注3:pinmux dts中支持的标识(Flag)参数,可以同时配置,且没有顺序限制;例如,使用如下的方式可以同时使能
P07引脚的数字输入与上拉电阻功能:DT_PAN_PINS(p0, 7, uart1_rx, PAN1080_PIN_FUNC_P07_UART1_RX, input-enable, bias-pull-up);
注4:
DT_PAN_PINS()API接口必须与外设模块中的pinctrl-0属性一起使用才会真正生效;如果只使用此接口配置了某个引脚的上拉/下拉/数字输入使能,但没有任何外设的pinctrl-0属性中配置了此引脚功能,则当前的DT_PAN_PINS()配置不会生效。
5.4 PAN1080引脚使用注意事项¶
切换引脚的复用功能时,需要特别注意此引脚是否为数字输入引脚,如果是,则一定要显式开启此引脚的数字输入功能,具体可以采样上述介绍的任意一种可行的方式;
例如:我们需要将某个IO配置为UART Rx功能,由于Rx引脚用于接收外部的数字信号,因此将IO的MFP功能切换为UART_RX后,还应将此IO的数字输入功能打开,否则UART将无法正确接收对端发来的数据。
IO引脚的数字输入功能一般需遵守非必要不打开的原则,这样可以减少可能的电流漏入,有助于降低芯片整体功耗;
PINMUX Driver操作的上拉电阻、下拉电阻、数字输入等功能,需要确保已经开启了GPIO模块时钟方可正常配置(SDK中已默认开启);