Solution: Multimode Mouse Dongle¶
重要
此例程仅存在于特殊版本的SDK中,如有需要请联系Panchip。
1 功能概述¶
此sample为pan108xxb1(32pin芯片、1M Flash)或者pan108xxa1(32pin芯片、512k Flash)在实体接收器板下的应用
具体支持的feature如下:
2.4G模式(PRF增强型模式)
跳频:在信号质量不好(连续
RX_LOST_PKT_LIMIT= 9ms收不到数据)/对码前在8个频点(每个频点RX_FREQ_HOP_MS=9ms)进行跳频对码:上电跳频找到dongle端的频点后,通信互发对端的MAC地址后2字节,之后切换到私有地址进行通信
数据:数据跟随方案,对鼠标数据进行解析上报
性能:配合鼠标端性能
EMI测试
USB DFU升级
2 环境要求¶
board:
pan108xxb1/pan108xxa1(芯片型号)接收器(带usb)、pan108xxb1/pan108xxa1(芯片型号)evb开发板(调试使用)uart (option): overlay中默认P24显示串口log
鼠标测试工具:MouseTest.exe
3 编译和烧录¶
例程位置:zephyr\samples_panchip\solutions\multimode_mouse_dongle
使用 ZAL 工具可以对其进行编译、烧录、打开 VS Code 调试等操作。关于 ZAL 工具的详细介绍请参考:Zephyr APP Launcher 工具介绍。
4 演示说明¶
芯片全部擦除还原默认状态,准备好烧录multimode_mouse的接收器
4.1 初始对码¶
初始对码时,初始鼠标板(全擦除后烧录)先上电,鼠标端快速闪动时插入接收器,鼠标由快闪变为呼吸灯
之后鼠标未强制对码时,接收器可以一直保持,鼠标端重新上电可以与接收器通信
4.2 强制对码¶
鼠标端进入强制对码时,需要重新插拔接收器,鼠标端快速闪动时插入接收器,鼠标由快闪变为呼吸灯
4.3 DeviceTool使用¶
配合上位机工具键鼠专用工具\PAN108x工具\MouseDeviceTool可以进行产线USB信息测试及单载波测试,具体操作可以参考工具内说明文档
默认界面支持自定义消息开发
显示界面可以切换到USB设置测试功能界面
5 开发说明¶
5.1 架构说明¶
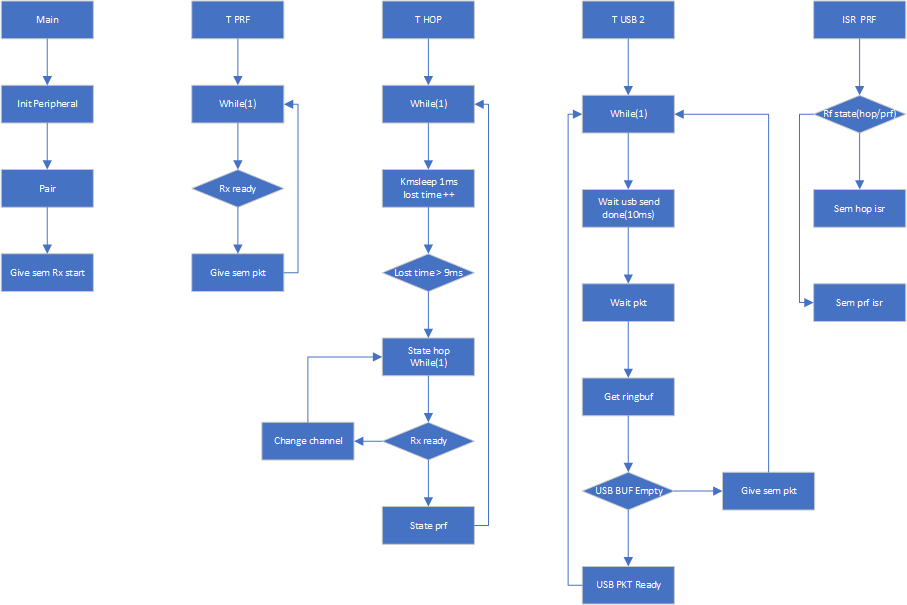
multimode_mouse_dongle基于zephyr架构,进行多线程编程,线程静态初始化后,根据优先级进行先后初始化,之后各个线程运行至while(1)等待相应的信号量,以此通过控制信号量控制各个线程的调度关系
架构中应用层主要包含
4个线程
跳频
对码
RF发包
USB发包
2种中断
USB中断
PRF中断
USB EP3接口(VENDOR DFU):通过USB中断进入进行DFU升级,EMI测试
5.2 线程说明¶
线程定义方式如下
/**
* @brief Statically define and initialize a thread.
*
* The thread may be scheduled for immediate execution or a delayed start.
*
* Thread options are architecture-specific, and can include K_ESSENTIAL,
* K_FP_REGS, and K_SSE_REGS. Multiple options may be specified by separating
* them using "|" (the logical OR operator).
*
* The ID of the thread can be accessed using:
*
* @code extern const k_tid_t <name>; @endcode
*
* @param name Name of the thread.
* @param stack_size Stack size in bytes.
* @param entry Thread entry function.
* @param p1 1st entry point parameter.
* @param p2 2nd entry point parameter.
* @param p3 3rd entry point parameter.
* @param prio Thread priority.
* @param options Thread options.
* @param delay Scheduling delay (in milliseconds), zero for no delay.
*
*
* @internal It has been observed that the x86 compiler by default aligns
* these _static_thread_data structures to 32-byte boundaries, thereby
* wasting space. To work around this, force a 4-byte alignment.
*
*/
#define K_THREAD_DEFINE(name, stack_size, \
entry, p1, p2, p3, \
prio, options, delay) \
K_THREAD_STACK_DEFINE(_k_thread_stack_##name, stack_size); \
struct k_thread _k_thread_obj_##name; \
STRUCT_SECTION_ITERABLE(_static_thread_data, _k_thread_data_##name) = \
Z_THREAD_INITIALIZER(&_k_thread_obj_##name, \
_k_thread_stack_##name, stack_size, \
entry, p1, p2, p3, prio, options, delay, \
NULL, name); \
const k_tid_t name = (k_tid_t)&_k_thread_obj_##name
根据线程定义,定义了如下几个线程
5.2.1 FREQ_HOP线程¶
跳频线程,内部计算丢包数,达到阈值进行跳频,收到数据结束跳频
#define FREQ_HOP_THREAD_PRIORITY 2
#define FREQ_HOP_THREAD_STACKSIZE 1024
K_THREAD_DEFINE(freq_hop, FREQ_HOP_THREAD_STACKSIZE, thread_freq_hop, NULL, NULL, NULL,
FREQ_HOP_THREAD_PRIORITY, 0, 0);
5.2.2 PRF_PAIR线程¶
配对线程,上电在公共地址和私有地址进行切换接收,公共地址收到对码数据后,切换为私有地址,私有地址收到数据后直接退出对码维持私有地址,不再切换地址
#define PAIR_THREAD_PRIORITY 2
#define PAIR_THREAD_STACKSIZE 1024
K_THREAD_DEFINE(pair, PAIR_THREAD_STACKSIZE, thread_pair, NULL, NULL, NULL,
PAIR_THREAD_PRIORITY, 0, 0);
5.2.3 PRF线程¶
2.4G主线程,接收数据,判断数据seq并为USB准备数据
#define PRF_THREAD_PRIORITY 2
#define PRF_THREAD_STACKSIZE 1024
K_THREAD_DEFINE(prf, PRF_THREAD_STACKSIZE, thread_prf, NULL, NULL, NULL,
PRF_THREAD_PRIORITY, 0, 0);
5.2.4 USB线程¶
USB线程,USB插入PC时进入,获取组包并且上报
#define USB_THREAD_PRIORITY 1
#define USB_THREAD_STACKSIZE 1024
K_THREAD_DEFINE(usb, USB_THREAD_STACKSIZE, thread_usb, NULL, NULL, NULL,
USB_THREAD_PRIORITY, 0, 0);
5.3 RF中断说明¶
接收器为PRF RX端,增强型模式会在RX后自动转入TX, 中断中主要处理信号量sem_prf_isr的给出及再次开启rx,rx_lost_cnt的计数
5.4 主要数据结构说明¶
5.4.1 枚举状态¶
5.4.1.1 配对状态、地址类型¶
enum prf_pair_stat_t {
prf_pair_default,
prf_pair_start,
prf_pair_comm,
prf_pair_end,
};
enum pair_addr_type_t {
prf_pair_public,
prf_pair_private,
};
5.4.1.2 2.4G RF状态¶
enum prf_trx_stat_t {
prf_idle_stat,
prf_tx_done_stat,
prf_rx_done_stat,
prf_rx_timeout_stat,
prf_rx_crc_err_stat,
prf_rx_pid_err_stat,
};
5.4.1.3 跳频状态¶
enum prf_freq_hop_stat_t {
freq_hop_disconnect_stat,
freq_hop_done_stat,
};
5.4.2 全局结构¶
5.4.2.1 组包ring_buf(zephyr)¶
/**
* @brief A structure to represent a ring buffer
*/
struct ring_buf {
uint32_t head; /**< Index in buf for the head element */
uint32_t tail; /**< Index in buf for the tail element */
union ring_buf_misc {
struct ring_buf_misc_item_mode {
uint32_t dropped_put_count; /**< Running tally of the
* number of failed put
* attempts.
*/
} item_mode;
struct ring_buf_misc_byte_mode {
uint32_t tmp_tail;
uint32_t tmp_head;
} byte_mode;
} misc;
uint32_t size; /**< Size of buf in 32-bit chunks */
union ring_buf_buffer {
uint32_t *buf32; /**< Memory region for stored entries */
uint8_t *buf8;
} buf;
uint32_t mask; /**< Modulo mask if size is a power of 2 */
struct k_spinlock lock;
};
5.4.2.2 packet格式结构体¶
struct pkt_detect_t {
uint8_t key_value;
int16_t x_value;
int16_t y_value;
int16_t roll_value;
int8_t header;
int8_t sequence;
int16_t reserved;
};
5.4.2.3 配对信息结构体¶
struct pair_ctrl_t {
enum prf_pair_stat_t prf_pair_stat;
bool prf_pair_timeout;
bool paired_flag;
uint8_t pair_own_addr[2];
uint8_t pair_peer_addr[2];
uint8_t pair_cnt;
bool pair_saved_flag;
enum pair_addr_type_t pair_addr_type;
};
6 RAM/Flash资源使用情况¶